Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Building my Sailboat Carina from scratch Thu Oct 18, 2018 11:57 pm
As naval model sites have a limited endurance resulting content getting lost I do publish reports on my building from scratch report on naval model sites and electronic forums. I do not just copy an older report, but I do write it once more. It is interesting that rewriting a report with new own words benefits from past experiences doing so and it is joyful for me as then I live through those work processes. On the other side, if I make sure this is not just copy and paste activity readers might find it of interest, ad their comments and suggestions ad create through this an exchange of ideas and concepts and critics something that should be beneficial for both sides. Also since I have started this project getting closer to 2 decades by now my health has deteriorated substantially. I have had 4 cerebral strokes, a couple of times my heart deciding to make a pause that led to have a pacemaker and this pacemaker resulted in the knowledge of the doctors that I was also having problems with my heart. I take 15 pills a day plus an injection once a day to combat my diabetes the interactions of the pills, the right selection and dosis for those were partly responsable for some of the trouble. So my love and my fascination for the way I do handle this project of my sailboat Carina and in relation to it my development of my workshop has already had the effect of repair and reorganisation of my brain and the creation and strengthening of some blood veins feeding my brain. It has helped to keep a structured day which is key to keep your body and mind in good shape. I am mentioning this because unfortunately many of the naval modelers have the same age or even older than me and so I am sharing my experience with you.
It was about 2012 when I realized that I would not be employed again. I was not even accepted to put products at their place in supermarkets, as that was not the job for a former director of one of the large US telecommunication companies. So I decided to reactivate my old hobby of building models, it used to be sailplanes. As now my financial resources were less I decided to build a sailboat model from scratch. They are less prone to crash and in consequence the financial resources consumed are smaller. I have always been an aficionado for planes and did even have the license to fly single engine motor planes. I am still convinced that being a pilot of a plane is less painful and frightening the being a skipper on a sailboat. In planes you can crash the plane and the death would be instant and without having to suffer from pain. The idea of drowning in case a boat sinks does scare me a lot. So controlling a sailboat via RC from the shore of a pont was the new field in which I was embarking!
So on my way to the office I had passed next to a model supply shop and so one day I decided to stop there and buy myself a plan. I was given a catalog and viewing it I decided to purchase a plan of a sailboat model named "Voilier" which as I learned later just means sailboat in french:
So considering I had to spend the equivalent of 30 Euros for the plan I was very disappointed when I did receive just a single A0 size paper shown here:
Just looking through the details of the plan I realized that having received a copy of a copy of a copy... of the original plan the data extracted from the plan required rework to make it exact. I used 2 different techniques. First I did take measures from the plan and draw the plan on a millimeter paper. Then I passed the values to an excel sheet and had it draw curves where values that could not be correct became visible and I did correct the there. With this improved hull shapes I did use a technique called "straaken" in german. You use a wooden lath which you bend along the curve on the plan and make it to bend without external forces influencing the bend. This results in curves that are smooth. Of this technique I did not make fotos from:
Additionally I decided to choose the variant offered in the plan for a deeper hull and I decided to make it a bit wider. The reason for it was, that taking into account the size of the sails a center of gravity had to be as low as possible. This issue had a big influence on design decisions I made later. So I did you a free cad software to make the wooden frames for the hull. I choose a special kind of triplex like wooden plates that is pretty brittle.
Here you see why I love to work with wood to make a hull. The shape of the hull is one that I do like a lot. The process of sanding the lths to get a result a finish as shown in the photo is a long and endurance requiring process. But in the later phases of this work when you run your hand over the curved surfaces it has an equivalent feeling of that between humans!
here you see how I did glue the frames shape printed on paper onto the triplex wooden sheet, just 5 mm thick. What I would do different next time is not to use paper but caton sheets. The reason is that the shape of the printed frames change when you apply the liquid paper glue. It makes the paper wet. by using considerably heavier paper this negative effect can be prevented.
I do not remember how many times a day I went into my workshop and enjoyed the view during the process. The laths I used were 5 x 3 mm. This resulted to be thick enough to allow sanding the hull shape into its perfect form. The fact that I wanted the wooden laths of the hull to remain visible demanded me to work very exact as possible as no filler could be used. As you can appreciate, every effort you put in the preparation of the task of making a wooden hull and placing the laths upfront saves you ten times the effort to fix it later. You can also see the "ears" of the frame responsable to place the frames at the proper altitud to achieve the proper deck shape and altitud. You can also see how those "ears" were fixed to short lath across the hulls main axis using metric screws.
Here you see my son, the 2 of us changed the task while sanding the hull. What was really impressive was what augmented the task of iterating the sanding of the hull was the following. We sanded first one side of the hull until we had the feeling it was kind of OK. The the other one did the same to the other side of the hull. But what happened frequently was that when we stopped sanding our side of the hull, we felt that the prior side was too rough! Simply impossible to stop iterating.
Here I do show you a picture of the inner side of the hull and a view from the top. As you can guess i wanted to use the beam across the future deck surface to have the desired curvature. This later proved not to work but at least it ensured the stability of the hull during its construction phase.
In this picture taken a bit down the road. You can still see where the frames used to be by the lighter color of the inner surface of the hull. You can also see how I tricked a bit to lengthen the hull shape at the rear. The big benefit is that now you can apply the glass-fibre matting with epoxy also within the hull in a similar good manner you can apply it on the wooden hull from outside. I did use glas fibre of 100 g weight. This is the strongest fibre matt you can get that becomes invisible after applying and sanding it. It is important to apply glas-fibre matt symmetrically inside and outside of the hull to prevent the wooden laths to modify the surface. It is amazing, but a wooden hull shell that is so thin that you can see a shade from inside and outside the hull and still be able to have you feel the individual laths due to the wood "working"!
Another aspect you can see in this picture is that I put liquid lead into the hulls bottom without damaging the hull. The point is to fill in the liquid lead in small quantities at a time. At the beginning you spill very little lead in the hull. Later when you insert more led the lead inserted earlier helps to diffuse the heat from the cooling liquid lead. So at this early phase I did insert the amount of lead you an see in the hull. Compare this photo with the one before. The hulls shape does not change even after removing all the frames.
Here you see my son applying epoxy onto the fibre-glas matts within the hull. I am sure you can appreciate how much easier and better quality is applying glas fibre matts to the inner side of the hul shell.
My wife asked me why not make the complete deck removable? I decided to implement a "labyrinth sealing". When you look in detail into the picture you see to brass colored aluminium L-shape parts on both sides of the hull in the middle section. The reason for this was to make a component that would make the pull forces of the sail sheets that are placed on all 4 sides of a mast flow into the hull sheet in a way it would not damage it. I did glue those 2 L-shaped brass colored aluminium beams to the wooden hull. Each is 20 cm by 3 cm which result is a surface of approximately 60 square cm surface glued to the wooden hull shell. Then, where the mast is going to be, I inserted an aluminium beam with the hole for the carbon fibre mast, screed to the aluminium parts on both sides.
You can see that I placed a U-shaped aluminium beam surrounding the complete hull opening. I selected this aluminium beam so that I could insert another U-shaped aluminium beam, bottom open into the top open aluminium beam on the hull shell. As you can imagine this means that the deck I would build would have to be so perfectly shaped, that the bottom open U-profile aluminium beam would fit tightly. This is less than 1 mm over a length of 165 cm!
Here, in a more advanced phase of the hull building you see the complete aluminium U-shaped structure on the hull where each deck building would be also removable and so its opening was within a ring of aluminium beams open to the top. So any water that might get here is then collected in the aluminium structure which would have on each side a sink to collect the water within the hull in a small tank. Also you can see the servo to control the rudder mounted.
This 2 photos show how the rudder shaft was made and placed.
Roadrunner Forum Overlord
Posts : 1715 Join date : 2011-06-10
Subject: Re: Building my Sailboat Carina from scratch Fri Oct 19, 2018 9:36 am
Awesome build so far, oh and welcome to the forum!
Keep posting can’t wait to see the finished model!!
_________________ I'm Not Anti-Social, I'm Anti-Stupid.
Guest Guest
Subject: Re: Building my Sailboat Carina from scratch Fri Oct 19, 2018 6:35 pm
that is a stunningly beautiful build, something that I, even as a woodwork teacher of 22 years standing and model ship builder of 59 years experience, could never ever achieve...…..pure magnificence...…
and I like the fact that you have got your son interested and involved in too.....am looking forward to keep up with this build.
thanks for posting it.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Sat Oct 20, 2018 1:23 am
Very sad for me! My son had to do a work in its 8th class over the period of a year. Out of this experience, he is not interested in further model building and not even electronics. And today, he has finished learning to become a telecommunication technician, not even the electronics or informatics are of interest to him! You will see later in this report I am doing a lot of work in electronics and programming. So my beautiful workshop will go into a trash container after having sold some equipment in it when I pass away!
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Sat Oct 20, 2018 9:24 am
Now to the aluminum frame of the detachable deck:
I started Making the frame that matches its counterpart on the hull shell.
Here a detailed image of the frame showing the bow part of the frame. You can see the slot and its counterpart in the bow of the hull. The hole on the hull has a thread for an M3 screw and has the aluminum is within the chamber filled with epoxy the shroud coming from the mast will be able to resist any pull coming from there. You can also appreciate the work in progress so that it will fit tightly into U-profile on the hull side. You can also see the spacers with the screw receptacle.
The 2 images show how the deck is being pressed onto the hull. The wooden top of the hull shell has not yet been sanded to align with the width of the hull shell. That is why it is too wide and the deck aluminum only touches part of the wood.
The drawing shows that detail.
This photo shows the bow down to the opening in the deck frame for the first also detachable cabin. The 2 vertical U-shaped aluminum beams that fit into its counterpart on the hull side.
Here the stern side of the aluminum frame of the hull. You can see the screws that connect the aluminum parts of the frame, their heads grinded away.
Another view of the bow where you can see down to the lower end of the cabin opening. What also is visible is that that wide aluminum parts used still need to be worked on to make the full size of the cabin opening accessible. At a later phase when the work on the aluminum frame of the deck is more advanced and I will have to have the cables to deck lightning placed, I will remove as much as possible of the aluminum to have the center of gravity of the hull as low as possible. But in this phase, the shape of the aluminum frame of the deck has to be made as solid as possible to ensure its geometry.
This photo shows the detailed box with the aluminum part of the bow of the hull fitting into the deck's frame. As you can see all these parts fit together very tight.
Another detail showing the opening for the 2 cabin openings in the middle of the hull. Here also you can see the screws used to join the parts and the process through which I ensured the decks frame to fit tightly onto the hull and parts of the labyrinth sealing around each cabin opening.
This image shows the placing of the mast receptacle which receives the mast and which is sealed to prevent water to enter the hull through this opening. Also, you can see the first design of how a stepper motor that replaces the usual winch. This part of the construction will be changed completely. More about it later.
Here in detail, an opening for the cabin in the deck, now with the deck frame mounted onto the hull. You can see the U-shape, open to the top, from the hull surrounding completely the opening and the opening on the deck frame that leaves space for the structure of the cabin that will reach tightly into the U-shaped frame of the hull.
Here at a later phase of the construction, you can see the "collar" that will frame the opening for the cabin. You can see the L-shaped corners of the collar and the room reserved to take a glass. The intention is that you can later look into the cabin through its windows through this glas plates on the deck and their counterparts in the cabins frame. Also here, you can see that water to enter the hull through the openings around the detachable cabin will have to slip under the cabin sealing to the deck, flew over the collar of the opening, down to the U-shaped, open to the top, from the hull part of this labyrinth sealing and finally the complete U-shaped frame on the hull that offers a relatively bis space to take the water and the drain of this to collect water into plastic container. Also visible are the arcs that will shape the deck surface so that water will always flow from the center to the edges of the deck.
These pictures do not yet show the arcs you have seen on the previous photos. But now you see the bow of the deck already fitting to the hull. Again, I want to mention, that care will be taken at a later phase to reduce the weight of the decks aluminum, but for now this gives the decks frame the stability required.
Here a view on the decks aluminum frame from the rear, very visible the arcs.
Here a picture of the frame of one cabin and how it fits into the opening. I will probably change this construction of the cabin frame by replacing some aluminum parts of it against wooden parts to reduce the weight.
This photo shows the placement of the servo and the rudder mechanics. The servo has a cable drum, as well as the rudder mechanics. Between the 2 will be a metal wire that is fixed through the screws you can see on both drums. The metal platform on which I will place the steering wheel which will rotate according to the rudder position moved by a small stepper motor taken from cannibalized printers. But also during the construction phase, it plays an important role. The surface of this plate is 100% horizontal so that it offers a reference point to ensure proper alignment of the deck and the constructions on it.
Same is true for the plate on the deck frame that shows the opening for the mast. Special care will be taken with the sealing to ensure the deck and the brass tube in the hull that receives the mast seal as good as possible. Remember the brass tube is fully sealed to prevent water from entering the hull this way. Also, this platform is 100" horizontal for the same reasons that applied to the platform where the steering wheel will be mounted. Again the construction you can see through the opening in this photo will change completely and care will be taken at a later phase to reduce the weight the aluminum has to get the lowest possible center of gravity.
Finally a first view of the hull with the attached deck and the brass tube that will be shortened later to align with the deck surface. But here this brass tube is used to ensure it is 100% vertical in the relationship with the platform around its opening.
Here you see my first testing of the hull in water with the carbon tube of the mast inserted into the brass tube. I also used this to see how much weight is left to the boat by putting weight into it until it reaches the planned depth of the water surface.
This picture is to show the progress achieved with the detachable deck in the same position as was the first picture showing the delicate structure at the beginning of this work!
davidjt Forum Sponsor
Posts : 534 Join date : 2013-01-08 Age : 72 Location : n wales coast
Subject: Re: Building my Sailboat Carina from scratch Sat Oct 20, 2018 3:46 pm
wow that is some very nice engineering there how long has that taken you to build excellent build
david
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Sat Oct 20, 2018 3:54 pm
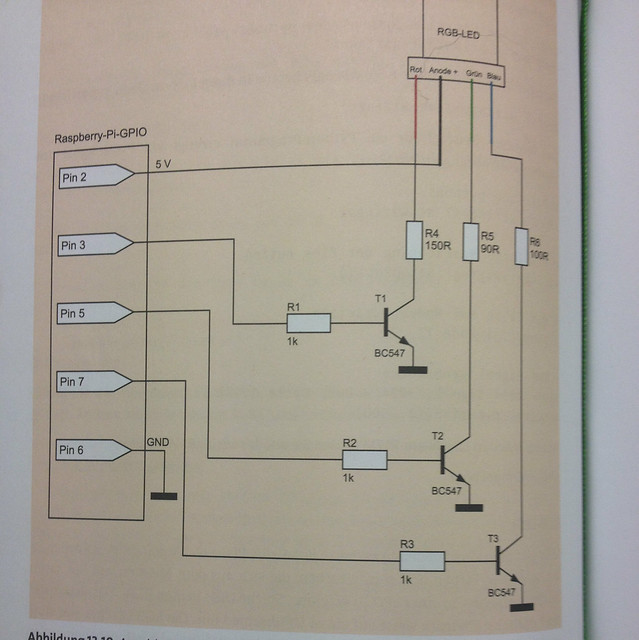
Sometime during the construction progress shown up to here, I attended a weekend with my friends from a German forum and was fascinated by the view when they navigated their RC boats during the night. Lighting became obvious to me a very interesting feature of a naval model and so I decided to add lighting to my model. I came out thinking over it to place light bodies inserted in the rail construction to have them indirectly illuminating the deck surface and to be dimmable from minimum to full illumination as would happen during a party on deck the boat being in the harbor. And additionally to illuminate the stairs that on the real sailboat would be used to enter a cabin.
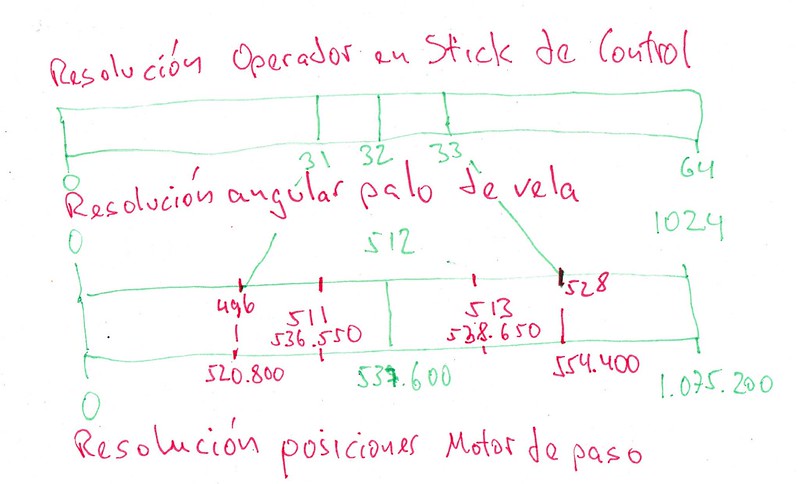
This drawing is to explain how I want to place the light sources into the rail. To explain let me translate some of the terms used in the drawing:
Next, to the light source, you see a sample light body with its LED. I entered the challenge to make the small boards on which the LED is placed. I use this opportunity to introduce to you some workshop equipment I use.
First the drawing of the light bodies I did plan to use:
First I draw the image of the small board to be made to mount a LED in my CAD software. The bid black surfaces are connected to the 2 poles positive and negative. The circles in the middle are to diffuse the heat generated within the LED.
Then I group 8 of them and printed it on a transparency foil. This picture of the 16 boards I do use to pass the images to a photosensitive board. For doing this I build myself a device to expose the foil and the board using ultraviolet light from a facial tanner I bought for just about 10,- Euros at eBay.
As you can see I build a cabinet for it so that the timer of the facial tanner is accessible from outside the cabinet. On the top of this unit there is a window and an aluminum frame around it so that its cap fits tightly to prevent ambient light to get to the glass surface of the window.
Here a view from above that shows the facial tanner from Philips I use. Buying a facial tanner in eBay is cheaper than buying the ultraviolet light tubes by themselves.
Here you see my exposure device with the cap placed to press the transparency onto the photosensitive board. Next, you place the board you just exposed to the ultraviolet light into the developer fluid, NaOH, sodium hydroxide. After having done this you can kind of see where the black surfaces of the small boards show. Best results removing the copper from the board I did achieve with the simple setup shown in the next photo:
I do use a sodium persulfate powder that is mixed with water, Na2S2O8. It needs to be heated that's why I placed it in a heat-resistant glass plate. In the photo you can see al excess copper on the board service was removed by the acid.
Here you can see a single LEd placed onto one of the small boards. Sadly first experiments with this normal LED, maximal 20 mA, proved the LED to be a too weak light source. So dimming the LED was not meaningful. I had calculated to have 24 of this LEDs distributed over the deck. 24 x 20 mA = 560 mA. Due to the results of this first experiment, I decided to switch to HB LEDs. Here each HB LED takes 500 mA or approximately the current required for all 24 originally planned LEDs. 24 x 500 mA = 1.2 A! I became aware of that the batteries to be used in this model better would have a lot of capacity.
The first issue I met reflecting about how to implement the light bodies with the HB LEDs was about how I would make the heat diffuse from each LED! It became obvious to me that a normal board material would be inadequate. I did some research and found a source for boards with a core that was made of aluminum and I did choose the one with a 3 mm thick aluminum core.
After plenty of research work, I did draw this image of the light source body. As this light sources would be installed where water will flow I had to make sure they were 100% sealed when installed.
Furnier = veneer Messing Block = brass part
What becomes evident studying this drawing was that I needed a process to make them that would result in 100% identical light source bodies were any of them would fit into any of the 24 receptacles I was going to have. My work with a Bosch drill did not achieve this goal. So I purchased a Tower Milling machine for which I had been saving the money over a longer period of time. The gray colored part of the body is the board with a 3 mm thick aluminum core. A challenge to face was to ensure no short circuit could happen, but heat diffusion had to be as good as possible! So the orange colored parts in the drawing are made of brass or aluminum plates. I also have to find a proper solution the plus- and minus poles would not short circuit over the aluminum core of the board. Thin heat transferring but an electrically isolating sheet would have to be placed between the brass parts and the aluminum core. The brass sheets, orange colored, would be in touch with brass surfaces of the receptacle taking care no short circuit could happen. This makes it necessary to ensure total sealing against water entering the receptacle for the light source. For this, I decided to place a small board with an humidity and temperature sensing device from a Swiss company. The size of this device is just 3 x 3 mm and below 1 mm hight. So I will mill a cavity that would take this small board. This small board would have lanes for both poles plus 2 for an I2C bus.
Here a first board I made using the board material with the aluminum core and an HB LED soldered on it. Between the copper layer and the aluminum core is an extremely thin electrical isolation. The body doesn´t look nice, but it taught me a lot of what aspects required my care. You can see that placing and soldering the HB LED on its board was not a problem. But preventing a short circuit between the aluminum core and the top copper layer proofed to be very critical when cutting out the small board. I take this opportunity to introduce to you my DIY reflow furnace.
.
Let me explain why reflow soldering was the ideal way in my opinion to solder the HB LED onto its board with aluminum core. Each electronic device has in its datasheet a chart that shows what temperature against time requirements the device has to be soldered using the reflow soldering method. I did build it using a metallic pizza oven purchased at eBay for about 50 Euros. I did put emphasize that the oven should have as little as possible plastic parts. The pizza oven is placed in a box made using isolating and not flammable foam plates. You can see my test effects using a propane flame. The foam did not more than just getting a bit black. You can also see that the top plate is inclined in such a way that hot air flows out of the box through the bit higher front part. I also made sure it is neither too close to the wardrobe nor any other stuff that could burn. On top of the pizza oven, you can see the cable supplied with my multimeter device capable to sense heat up to more than 300 °C. First I had thought about controlling the pizza oven using a microcontroller board and properly isolating relay. The reason I did not do it was, that I have yet no experience to combine electronic circuits and the electrical net of our house. This has the potential to be dangerous! But after some experimenting with the oven and a test board, I found out that the initial increase of temperature is easy to achieve just by switching the oven ON and have the temperature increase to the temperature of the platform. The critical part is once you increase the temperature up and beyond the minimal heat requiring to reach the solder paste to melt for jus a maximum of 10 seconds. I do increase the temperature of the oven to maximum and watch the solder paste. In upfront experiments, I learned that the solder paste changes from a matt grey color to a bright grey color when melting. This moment in time can be seen with no doubt. To ensure all solder past melts, I speak the numbers 1 to 5 after the color changed to bright grey and then I switch my pizza oven OFF and do open the front door. Doing so I am certain I have not been more than 10 seconds above a limit temperature were time becomes critical to the time the temperature dropping fast due to the open front door.
This chart shows a typical reflow soldering profile.
Now let's go on with the report of building my boat.
Here you see my tower milling machine drilling the holes in which I cut the thread for the M3 screw. In combination with the coordinate table, I can position the milling device in a repeatable fashion and drill the holes at their exact positions.
This shows the form plate that I can reuse whenever I need to make more light sources, 10 columns of the light source devices. As you see this demands extremely precise positioning of the holes in which I do cut 3M screw threads.
Here you see on the aluminum plate 4 brass beams screwed on it. The exact positioning is key, as the m3 screws have to fit into the brass beam and the aluminum platform. These brass beams make the brass parts to be seen on both ends of the light source box colored drawing. Always to screws in front of each other are going to belong to a single light source body!
A typical experience I have during my project. As easy as it was to make my first generation boards for the LED, as impossible it was for me to get a good result with the boards with aluminum core.
I did test my processes using a thinner board with aluminum core. Here everything went fine!
Due to this problems, I emailed the picture of the small board's group that I had tried in vain to make to the supplier. After quite a number of tries, he sends to me a board with defective copper forms of the small boards. Here at least I could get the minimum number of such boards I will need at the beginning. By now nearly a decade later I guess the technology should have matured and I will be able to make better and more of this small boards.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Sat Oct 20, 2018 4:00 pm
It took years to get where my report goes today. The reasons are multiple. One aspect is that I did not know how to make something so I have to research and study options. That takes a lot of time! In this process of researching, studying the options and reflecting on how to make something I have found new topics I wanted to continue researching and studying the stuff. This brought up new possible used for those technologies! Also learning to use the tower mill and how to make something using its capabilities for me it takes time to reflect how to make it. You will see a lot of topics I have gone into an am still researching and studying as the report moves forward.
It is really so that not finishing the build is my objective, but researching studying and thinking of what those technologies offer opportunities for my build. Just to tell you upfront. There is a topic later about my scheme to control the length of the sheets to control sail position were some of the naval modelers specialized in sailboats considered my proposed solution to be inoperable. Other people from physics forums said that the problem mentioned does not exist! I have met some individuals that seem to be personally offended by not sharing their opinion both between naval modelers and physics aficionados. I taught to a teacher at the technical university of Munich who said that probably the naval modelers could be right. My intention became to model the problem and simulate it so as to get the data about who might be right.
In the beginning, I informed myself of software tools like Maple and similar that are already being used in the industry to model applications and simulate them. But those tools were far too expensive. Finally, I learned that Wolfram had a tool called "SystemModeler" which together with their software "Mathematica" had a cost I could afford. In this process, I learned about the software language for modeling called "Modelica" and its capability to model using a completely different approach I did like a lot. One key aspect of creating models is to compare the results from the simulation with those models and the data recorded through physical experiments. Just this topic made me aware of that my mathematical skills and those in I had about physics had eroded since my days at the university and that the advances had been so substantial that I had to look into what was being taught at the universities in mathematics, physics, and electronics. These days there are courses available at no cost on the Internet from all prestigious universities. As my mother tongues are Spanish and German and I have some fluency in English university courses in all these languages could be considered. Updating my knowledge, learning advances in those areas became a fascinating topic in its own rights. So by now, I keep updating my knowledge in this courses as I was requiring those abilities in my project! It's a lot of fun for me!
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Mon Oct 22, 2018 6:32 am
Next, I want to present to you of how I did make the letters to be placed the name "carina on both sides of the hull close to the bow and the town and country I was born, Guayaquil, Ecuador, at the stern. First the name:
and the town and country:
I got offered to get it done and so I accepted that offer:
Next, there are quite a number of topics, closely related which I do believe are key to understand why I did the decisions I took. I do not remember the exact sequence of events so I will try to find a way that should be logical to you.
By this time I had learned a lot about sailboats and sailboat sail control systems and how the sheets on an original J-Class sailboat where I did see their way to implement on the deck the sail control and the routing of the sheets on deck:
The second photo shows the steering will. I will make one as close as possible on my model. The idea is to place a stepper motor from a CD drive to turn the steering will be controlled by software and have the stepper motor turn it according to the rudder position. This is possible with such a stepper motor because the steering wheel is comparatively small and has little friction to overcome!
The first photo showed the pulley related to the control of the mainsail. In the original, the sheets go below deck at both sides so those crew members could handle the forces the wind in the mainsail would pass to those crew members. I was confronted with very personal reactions, both from members of naval modeling sites and from physics forums. The sailing experts said that the friction in the pulleys would be so big that they would render the sailboat to be not controllable. This after what I said about their second objection that loose sheet would block the control due to obstacles on deck. I will present to you in detail how I will ensure that never more sheet was available than required at every moment.
The people from the physics forums equally emotional some of them objected the issue with the friction as a pulley properly implemented would have no relevant friction whatsoever. I think that due to my willingness to listen to objections did ask a member of the physics institute at the Ludwig Maximilianeum university of Munich. His response was that physics students and physics "experts" tend usually to assume to ideal conditions so that he would select the objections from sailing experts of the naval modeling environment. My personal opinion is that naval sailing expert tends to do things at the established mature ways and as a result pretty much opposing "new ways" of making something. This position is absolutely OK when the focus of their objectives is to have a functioning model or those solutions in the regatta environment that had proved to be best due to constant iterations in optimizing everything on a sailboat.
This topic and my investigations and studies and my openness to new challenges made me decide to model those pulleys. More about it later!
So the batteries with the maximum capacity that would fit into my hull were those from "Headway", a link to such a battery.
Different from the battery cell shown in the link with just 15 Ah of capacity they also had 16 Ah ones when I did select and purchase them. Reflecting about how to cope with it I decided that when I would have to switch to the smaller battery cells I could add a spacer made of lead. The smaller cells, fortunately, have the same diameter of 40 mm and a length of 160 mm.
First, while still having the concept of installation of the stepper motor and for it to control the typical control hardware implementation my idea how to place the cells in the hull went into this direction:
Here the drawing:
Here the fake cells in the hull:
The reason I decided to place 12 of this cells into my hull was due to my intention to use an electric brake and those require at least 24 VDC applied to release. Stepper motors have their maximum torque when just holding their position. As during sailing the time where the sails do not change their settings switching the power supply of the stepper motor on "OFF" after the brakes are in effect. So no power would be consumed by the stepper motor and its brake. The wooden cylinders were the "fake battery cells" I would use during construction time to prevent accidental short circuits. These cells have a short circuit current of 240 A! 12 of this cells running at 240 A would have a catastrophic effect on my model but by sure an impressive pyromania presentation!
Here you can see my investments in equipment for my workshop to pay off! The tower milling machine milling an elongated hole, while my rotary unit, did cost the same amount as my lathe did, holds the fake battery body.
Here you see my fake cells being used to properly define the frames of the box in the hull that will contain these. In the elongated holes, the volume of them wsa computed that when filled with lead would result in having the same weight as the original cell. This makes the adequate for even more uses.
Here you see the fakes with the holes filled with lead and sanded so that the weight was really identical to +/- to 1 gr.
This was a drawing while I was in progress to define how I would implement the sheet control system for my sailboat. So the cells are placed in 2 boxes and the stepper motor is placed on top of the box. This approach was sourced by my intention to control the stepper motor which rotates a drum which is in its own case placed between the 2 battery cell boxes. the brass tube to receive the carbon beam of the mast would end on top of the stepper motor.
This drawing was the first iteration for the goal to have the stepper having a "position" for each angular sensor. Here I was considering an electromechanical solution. The idea is to have the beam of the mainsail rotate with an axis that rotates with the beam and so an angular sensor would track the actual beam angle and take from a table stored in the flash memory within the controller a corresponding stepper motor position which would have the sheet drum rotate until the length of the sheet was achieved for the beam position.
My goal with the drum was to have it have the maximum diameter that would fit in the hull so to have the minimum number of drum rotation to achieve the length change of the sheet of 8.3 meters. This is 21 full 360° turns of the stepper motor. So my sheet control system is defined around monitoring the beam of the mainsail and passing the instruction to the stepper motor controller how many steps to move! So I decided to have my foresail to have also a beam so that I could track the angular position of the beam the same way I was planning to do it with the beam of the mainsail. From this, I decided to place a stepper motor on top of the second battery cells box and have both sheet drums in their corresponding cases fit tightly into the space between the 2 battery cells boxes.
Related to the stuff above I decided to pursue to have a truth table implemented in a CPLD, name for small programmable devices, today you hear for this kind of programmable devices the name "FPGA"! It should ensure that it would connect the battery cells, a battery charging device, and react accordingly depending on the "ON/OFF" position of the ON/OFF switch of the model. Not so trivial for me, I am in a war against logic equations. But I have found out that I do have tools that define the proper logic to be implemented in the CPLD!
It was my goal that the box for the cells and other frames in the hull would be made using 10 mm thick aluminum plates. So this drawing shows how I wanted to realize the box to make shortcuts in the box or while or putting the cells in the box or taking them out. The battery cells are connected using an M4 screw. This screw would the go through the aluminum frame having an isolating device consisting of 2 parts made from plastic so that to the inner side of the battery box this plastic part would keep the pole of the battery and the M4 screw from touching the aluminum of the frame. This is what the drawing shows. I also purchased a pistol powder gun and am making a box within which the powder would be applied to the aluminum frames, the top caps for both battery cell boxes. This would also prevent possible short circuits!
This gun works having the gun electrically charge the powder particles and blow them against a metal part that has the opposite polarity. This attracts the powder from the gun. I the second step the metal device with the powder on it is placed into my pizza oven presented earlier to make the powder particles melt and great a coating that is electrically isolating.
Here a first drawing of the case that will contain a drum made by using 2 10 mm thick plates, one for each half of the case. Water coming into the hull due to the sheets being wet would be collected in this case. The exit of the sheet from the drum to go above deck willalso be used to get water out from within the case.
Here the aluminum for the plates and the frames of the hull.
Here the aluminum material used to make the 2 drums using my tower milling machine with the rotative table mounted on top of the coordinate table of the milling machine. I did buy the biggest model of the rotative table that would fit onto the coordinate table of the milling machine and that could take the diameter of this round aluminum parts. My lathe does not support the processing of parts with a diameter this parts have.
I am always disappointed that I am not able to make a frame for my hull first time right. As you can see here my wooden fake frame for one of the battery cell boxes. I have to make the fake frame to be perfect as the aluminum version of the frame will be made using this fake frame.
Here a view from above of this frame. As of the fake frame, it was only 5 mm thick, later I would glue 2 wooden plates together to have the right thickness. You can also see the platform on which I used to mount the stepper motor, below the fake cell you can see the lead I inserted into the bottom of the hull.
Here you see how I did use filler to get a fake frame perfectly fitting at its place in the hull. Remember that every one of this frames has to fit the hull at its position. You can also see that I did glue a paper with the proper placement of the holes through which the M4 screw connected to the heat of the cell would pass.
Now you can see how nice the fake frame fits into its position in the hull.
You can see the plastic parts placed where they will belong and you see how I adapted the wooden frame so that its top would be 100% horizontal when the hull is floating. You might remember that I had 2 platforms on the deck to have a reference when the hull is perfectly positioned along the axis of the center of the hull and the axis perpendicular to it. This will result in the battery boxes top to be 100% parallel to the water surface.
Here you can appreciate the cavities on both sides of the frame so that the plastic parts, when put in place, will align with the surface of the frame!
Here you see how I did prepare the rotative table to guarantee that the cavity around the hole in the frame is really centered. To achieve this first the hole drilled into the frame has to be just of the diameter of this centering device fitting tightly into the hole drilled. The hole drilled into the frame is used to position the frame and have the tower mill drill the cavity desired and appropriate for the plastic part.
Here a view of the plastic part. You see that they have different thickness as the cavities had.
Those 3 photos of the plastic part should show you how they are. The plastic parts I had to have them made by a friendly forum member who was able to make the at his working place. Using my lathe I was not able to get such a result!
This picture showed the 3 mm thick copper beam I would use to connect the poles of the cells in series as required. Each cell, discharged to the maximum not to damage the cell, offers a voltage of 2 VDC. 12 cells connected in series gives you the 24 VDC required by the brakes. This was a criterium to decide how many cells I would use. The cells fully charged would offer all of them together nearly 40 VDC. Using so thick and wide copper beams to connect the battery cells would result from those parts not to get as hot as to cause a fire in the hull. Also, those thick copper beams allow me to drill a hole into them to have the individual poles of the battery cells to be made available to the balancer of the charger for the batteries. I am still looking for appropriate connectors that should be small as possible but fully sealing against water. The Internet of Things and the industrial version of it is resulting in adequate connectors to become available.
Here the plastic parts now with the surface of the frame and the plastic parts perfectly aligned.
Finally the aluminum version and the real think of the frame you had seen earlier as fake version in wood.
Now an aluminum frame with the holes for the plastic parts drilled and you can see additional 4 holes drilled with a smaller diameter.
Here the answer. These 4 beams have multiple functions and reasons to be. One is that they determine the distance between the 2 frames of a single battery cells box. The second use is that bend around them and the battery cells will be a steel plate that ensures that each battery cell Will have a tight contact with the steel plate to diffuse the heat from it. Finally in the space between this steel foil and the hull will be filled with lead. I am prepared to mold cast a lead block by creating the mold using vax to fill the space between the hull sheet and the steel plate. As lead shrinks while solidifying the liquid lead poured into the mold the vax form will be "coated" with a wax foil that makes the lead in the mold to have the right size when solid again I also plan to make lead blocks that fill the empty space between the battery cells in the middle of the box! The objective of this is to achieve the lowest possible center of gravity for the model.
Here you can see how I apply the principle presented earlier to ensure the cavity of the plastic part is perfectly centered around the hole drilled for the screw.
Here you see the aluminum frame with the plastic parts placed in the cavities I just show how I made them. Also important is to highlight the fact that I am using countersunk-head M4 Allen screws so that also the heads of the screws align perfectly with the surface of the aluminum frame. Remember, the space between the center frames of the 2 battery cell boxes has just the width to fit in the 2 drum cases. Again here no empty space left to ensure the lowest possible center of gravity.
Here is an example of why I made fake battery cells. No danger of shortcircuiting the cells and if you look exactly you see the plastic parts in their cavity. You also see the 2 aluminum frames that make up one battery box. The shape of the 2 is a little bit different. You can also appreciate that there will be plenty of space between the hull shell and the battery cells and therefore see how important it is for me to fill it with lead to achieve the lowest possible center of gravity. From the early experiment with the hull floating in our bathtub I know I have plenty of weight available!
Here you can see the copper bridges I have made from the copper beam shown earlier with the countersunk-head M4 Allen screws aligned properly with the copper bridges.
Here now this same copper bridges mounted into the aluminum frame, but yet without the plastic parts. Again here I do use the fake battery cells. Most of the electrical isolation of the copper bridges and the aluminum frame is achieved by milling the cavity for the copper bridges. This is possible on this side because the thick element of the plastic part belongs to here. But where those copper bridges leave the area of the plastic parts I plan to insert a heat-resistant and electrically isolating textile fiber plus epoxy to glue them into position and to keep them there.
Here a sample I got for the heat-resistant textile. Powder coating will electrically isolate the complete surface of the hull and what it contains. At this moment in my building process, my tower mill got broken. I am seeing forward to fix it so I can continue.
This is an aluminum frame that is placed within the box and touches the other frame I did show you above. One of the reasons for it is to offer the steel plate a surface on which it can rest. And it also takes the mechanical stress from the plastic parts on the "outer frame". This picture also shows why it is so important to fill the empty space between the hull shell and the batteries in the battery box.
In this photo you can see not only how the copper bridges will be embedded in the plastic parts, but also the small surface of the copper bridge from where y take one of the poles voltages and to embed a copper cable for connecting the battery charger balancer.
This picture shows how myself with the equipment I have in my workshop and my little experience am not able to mill the cavity for the copper bridge. To fix this I will have to experiment with my milling machine before continuing.
This picture from the top shows how much empty space is between the cells themselves. On all 3 sides of the top center battery cell. As I wrote earlier, I will get the geometry of those empty spaces by using the vax and create a proper mold to get the perfectly shaped lead bodies. I will have to make some thinking about how to prevent those inner lead bodies to melt and damage the cells and probably short circuit them.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: My sheet control system Wed Oct 24, 2018 5:45 am
Hi friends. I have been thinking about how to present to you my sheet control system for the sails o my sailboat. I have already given some hints, but the topic plays a very important role in my project even today!
This is a drawing that shows what I am sure about you to know very well. The bow of the sailboat in the drawing is on the right side. Left is the mainsail that can open +/- 90° to both sides of the center line of the hull. The rotation axis of the boom of the mainsail is close to but not identical with the mast. The foresail boom I have decided I will have a rotation axis as shown in the drawing and can also open to +/- 90°-. Looking into this from the perspective of a sheet control system it is irrelevant to which side the boom is turning, the length of the sheet at the same degree of opening will require the same length.
The traditional and mature techniques to control the sails in a sailboat are the following:
This is a system using a servo instead of a winch. It handles the size differences of mainsail and foresail by connecting the sheet at different places of the servo arm getting the required sheet length change for 2 sail sizes.
This system uses a winch and a spring to apply a tension on the sheet so it does not drop out of the drum.
This is the "standard method" using a winch, here the winch placed at one end and
here placing it somewhere in the middle. The placement of the winch is usually defined by where in the hull you have a good access to it.
This method I have not seen used in a model. Instead of a winch, it uses a DC motor with a slip clutch.
This method is nice when you want to have the drum for the sheet on the deck!
I have presented these methods to show to you that I am familiar with the standard and mature ways to implement the control of the sail. I want to present to you why I decided to do it "my way", not only because I am stubborn, but because I wanted to implement a control system for the sails in my model that would appear on deck as to be identical to those used on the Endeavour original, early last century.
This picture shows what I am trying to reproduce on the deck of my sailboat model. I have seen that those original sailboats and models of the Endeavour the shrouds of the mast make it impossible to open the mainsail more than just by a reduced angle. Thinking about it made sense to have this limitation of the original sailboats. The forces that would work on the beam of the mainsail if the sailboat if this does heel and the beam touches or even immersed into the water. In a sailboat model of the size of mine, just 165 cm length of the hull those forces are neglectable. Here an advantage of not reproducing a selected original sailboat but just making reference to those during design decisions!
It is my opinion that the sheet i.e. on the left side will have a fake that makes it look as if it is going under the deck where on the original there was one of the 2 winches powered by human crew members force. The sheet goes over the shown pulleys. The block in the middle down is connected to a kind of traveler that allows the block can move over the range of the traveler. The block in the middle up is directly connected to the beam, which interestingly has a round profile and is not rectangular as often shown. The 2 blocks in front of the middle ones are connected each on its own rope so that the pull on the beam is distributed at 2 relatively far from each other points at the beam. A meaningful way to distribute the pull forces on the beam. Finally, the 2 blocks connected to connecting points on the sides of the deck so that the sheet then can be close to the deck surface.
My objective is to have the right side sheet go below the deck to where the drum is below the deck of my sailboat model. A similar way but with a more simple pulley will be used for the foresail. Not yet designed this part. To implement this on my sailboat model for the mainsail I have computed the need for maximum 8.3 meters of sheet length change. This results in the drum to make up to 21 360° turns to supply such a sheet length change.
So now let me present my system:
The goal of the system is that the stepper motor turning the drum will always just adapt the length of the sheet depending on the actual angle in which the beams of mainsail and foresail are open. To achieve this I will have a table with values stored in the flash memory of my controller. So my design has to be able to have an angular sensor monitor the actual angle in which the beam is open. Related is the challenge to make sure the monitoring does not be another possible entry point for water into the hull and that the elements of the sensor need not be destroyed by the water that will be flowing over the deck while maneuvering. I decided to use a magnetic angular sensor from the supplier "ams", a semiconductor company from Austria.
This simple drawing shows you the setup to monitor the actual angle of the mainsail beam. Different from the usual way to implement the mounting of the mainsail beam I have the beam connected fix with an axis that rotates with the beam rotation. This axis goes down and very close to the deck surface. On the bottom end of this axis there is a special magnet:
This magnet is glued to the axis from the beam as shown with the grey axis in the picture. The electronic component from ams will be mounted on a small board that is mounted below the deck practically touching a plastic foil over the required opening on the deck. This way the ams part is securely mounted below the deck and 100% protected from water getting into this opening by the small plastic foil. This way the ams sensor and the magnet will be closer than 2 millimeters apart from each other. This is required to get the 14-bit absolute angular position of the beam. Here the technical data of the device from ams:
AS5047P: Features
Up to 28krpm
DAEC dynamic angle error compensation
14-bit core resolution
Immune to external stray field
12-bit incremental pulse count
Zero position, configuration programmable
ABI programmable decimal and binary pulse-count: 1000, 500, 400, 300, 200, 100, 50, 25, 1024, 512, 256 ppr
Independent output interfaces: SPI, ABI, UVW, PWM
What is extremely positive is that the device can be programmed directly from the microcontroller without a dedicated device programmer. The 14-bit absolute angular data result in 16 * 1024 angular positions. As the beam will only open to an angle of +/- 90°, only a fourth of the positions monitoring are relevant, means +/- 4096 absolute angular positions can be monitored. This means that the table stored in the flash memory will need to have 4 * 1024 entries each a word long or 2 bytes which result in 8k flash memory requirement. The data coming from the sensor gives the information which entry in the table is to be read. This information will be used by the microcontroller to determine if the stepper motor needs to step and to which absolute position.
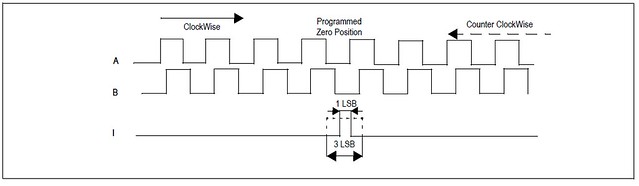
The device also offers the position data in the format for a so-called "quadrature encoder", here named ABI, which offers a resolution of just 12 bits or 4 * 1024 positions for a 360° full turn or just 1024 positions for the +/- 90° the beam can change its angle maximum. The data is called incremental position data. This means that the sensor monitors if a new position is a clock or counter-clockwise step. The quadrature encoder is a function block within the microcontroller I use. It takes the 3 entries, A, B and I. The device offers to select if the values are to be decimal or binary. Decimal means 1000 and binary means 1024. I will use the binary method as it is more precise. I will also use the same magnetic angular sensor to monitor the position of the stepper motor. Stepper motors can have step failures and so crosschecking the step position value from the magnetic angular sensor and the one from the stepper motor controller allows to recognize if an error took place.
So it keeps track in a register what the position of the angular monitored beam by adding or subtracting the value stored. Depending on what signal comes first from the magnetic angular sensor, "A" or "B" it adds or subtracts 1 from the value serviced and updated by the quadrature encoder feature of the microcontroller. Important is also the Index value or "I". When setting up the sailboat model to navigate the beam of the sail has to be passed over the middle position, the direction of the hulls center axis, and so the "I" value is initially determined. I will have a small LED to light up when the center position has been stored. Important when using electronics and software programs that depend upon registering when a value gets wrong, the Index position is checked every time the sail changes from one side to the other.
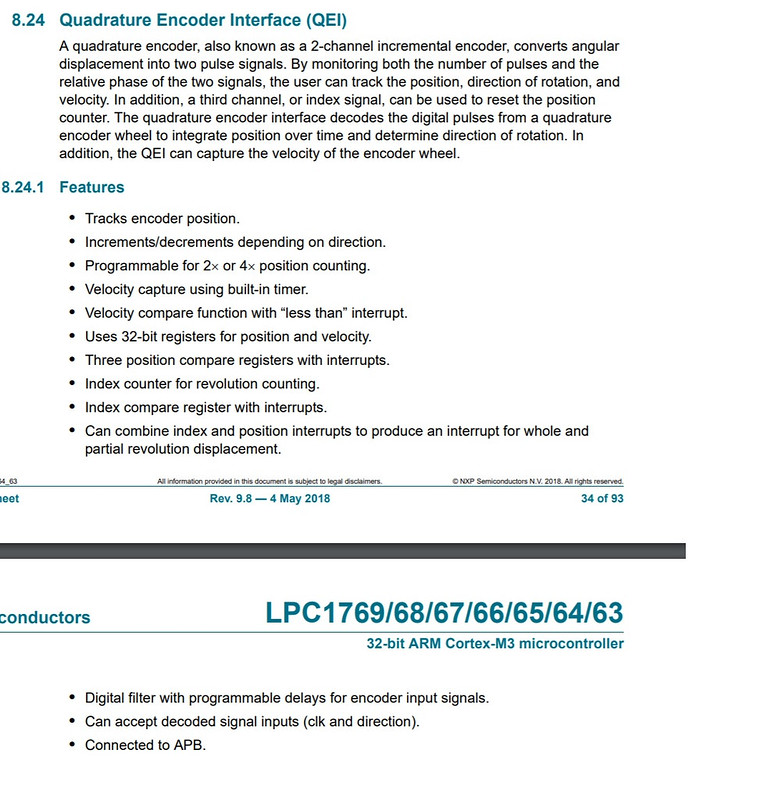
I will use a lpcexpresso controller board from Embedded Artists:
This board combines the functionality to debug, verify the code and fix it if required with the actual LPC1769 controller. This board is so cheap that it is cheaper to buy it than making it yourself. Making such a board is a nontrivial task. Here the link to the datasheet if you want to get more details i.e. the quadrature encoder.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: 2nd contribution to my sheet control system Wed Oct 24, 2018 7:33 pm
So far I have presented the most frequently used methods to control the position of sails and started by showing how my system monitors the angular position of the sails beams used to get out of a table stored in the flash memory of the LPC1769 microcontroller from NXP available as a very small and inexpensive LPCXresso board made and sold by Embedded Artists. This table will take just 8 kBytes of the 128kbytes Flash-memory of the NXP controller on the board. I also mentioned that the data of the magnetic angular sensor has the position information the stepper motor will have to take to just make available the length of the sheet for the beam in this position. As usual, the demanding part is hidden in the details.
Lets us continue with the stepper motor, the drum connected to it and the stepper motor controller. In this context, I will present a video that I made, that shows how fast the stepper motor can step and some theory of the stepper motor operation that is used by the stepper motor controller from Trinamic, the company delivering the best controller for stepper motors in the market. The experiments I made a couple of years ago were made using a board from Trinamic called steprocker and another one called motionCookie. Since those days Trinamic has further advanced its controllers and the boards for them. It always amazes me how little understanding is out there for stepper motors. I want to indicate, that I do limit myself to stepper motors called bipolar and there to those called hybrid bipolar stepper motors. Often the stepper motors we find by cannibalizing printers are called unipolar stepper motors. They are cheaper and they were simpler to use before a dedicated bipolar stepper motor controller became available.
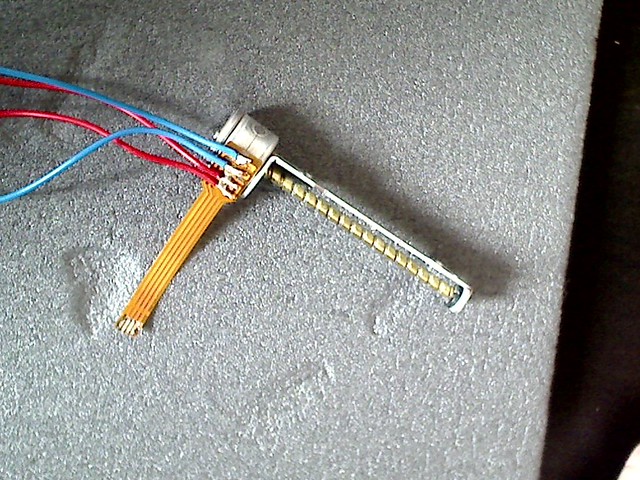
This is a bipolar stepper motor I got cannibalizing a CD-ROM drive. The diameter of the motor is just 2 cm. The 4 cables show it is a bipolar stepper motor. This motor could be ideal to make the steering wheel on the deck rotate as I could be placing it directly behind the center axis of the steering wheel. The challenge and the reason I use the conditional form is that the stepper motor and its axis are very sensitive to mechanical stress as the axis it turns is hold in position on one side by the stepper motor where it is the "rotor" of the motor and on the other side the mechanical endpoint that is part of the metal plate that is placed in parallel to the axis. The foil is a unit that contains the 4 connections to the stepper motor and on which the 2 blue and the 2 read cables are soldered to.
Here a stepper motor was taken from an old printer. You can see that it also has 4 cables of a flat cable soldered too. The problem is the larger diameter of the motor.
In general, the way I plan to make the steering wheel rotate is that the microcontroller uses the data of the RC receiver, a PWM, pulse width modulation signal from the socket of the receiver used by the rudder servo. Digitizing them by measuring the length of the active period, repeating every 20 ms. I will not present information about monopolar stepper motors.
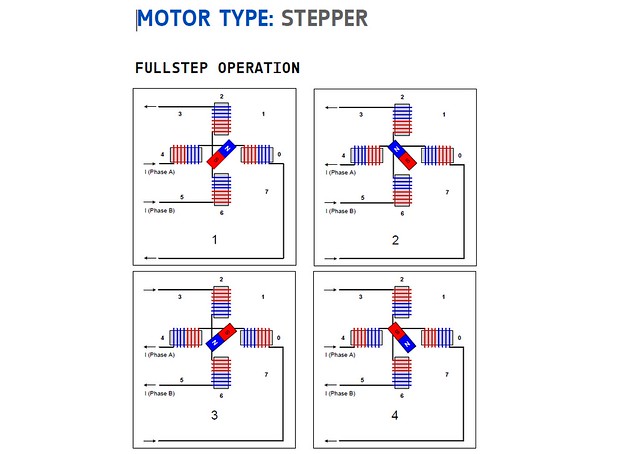
Here a very simplified drawing of a bipolar stepper motor. But key aspects relevant to the control and efficient operation of a bipolar stepper motor can be explained with it! First, you can see the 4 cables that make the 2 circuits in a bipolar stepper motor. Each circuit has 2 coils connected in series. Depending on the direction the current flows through them the polarity of the 2 electromagnetic magnets inverses.
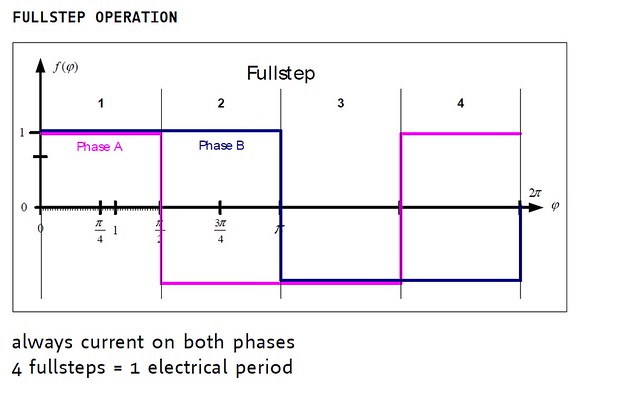
This graph shows how the 4 steps are achieved by applying all permutations of polarities due to the direction of current flow through the coils. This is what is called "full step" operation. The rotor, this is the turning axis that rotates within the stepper motor, has the 4 positions shown in the previous drawing. This allows me to explain why a stepper motor has its highest value torque when it is just holding its position. Let's assume we supply 4 VDC to this simple stepper motor. The current and its polarity are generated using a so-called H-Bridge.
The name H-Bridge is due to the fact that the 4 switches S1 to S4 are used to control the direction in which the motor turns. You all know this. When you connect a battery to the 2 cables od a DC-motor it will turn in one direction, when you invert the polarity applied to the DC-motor it will rotate in the opposite direction. Well, what you do with your hands connecting the cables to the battery and experiment connecting it in either way is what an H-Bridge does electronically:
In the previous video, you were presented how an H-Bridge works and the presented was mentioning his PWM, Pulse-Width-Modulation. The H-Bridge explains how the current and polarity are applied to the 2 circuits in a bipolar stepper motor. The next important technique that is being used to control a stepper motor is this PWM:
Basically what PWM circuits do is to allow to reduce the time current is actually flowing. Duty cycle is the name for the time period in which the current flows. The video nicely shows how PWM is used to either dim LEDs or to control the speed of a brushed DC-motor.
So a modern bipolar stepper motor controller does this 2 thinks. One it controls the direction in which the current flows through the 2 circuits in a stepper motor that has 2 coils connected in series achieving this way what the current flows as shown in the 2nd drawing. But this is an ideal behavior or is the behavior the stepper motor has when it is just holding its position and that is why the stepper motor holding its position has the highest torque to keep this position. The full 4 VDC I mention above are flowing through the coils which is a 100% duty cycle the voltage is constantly 4 VDC or as shown in the video 12 VDC.
A now old out fashioned but still often used solution for controlling a bipolar stepper motor is the Pair of L298 that contains 2 H-Bridges thus controlling the current flow direction by controlling what polarity is applied, and the L297 implementing the circuit to control the 2 H-Bridges in the L298. The video that follows shows a sample circuit using this 2 components to control the speed of the stepper motor:
And there is one more functionality of the L297 component. You can specify what is the maximum current your stepper motor should be exposed to. This is done by applying a resistance to the proper pins. This is not to be confused with the potentiometer used to control the duty cycle. And here a question I ask often to have my readers catch the basic idea ( not arrogance, but the intent of a none native English speaker to express himself).
What is the better bipolar stepper motor, means who should we prefer? Nominal values are those that appear printed on the motor or given in the datasheet of the motor.
Motor 1: Nominal voltage 40 VDC and nominal current 1 A. Power = 4 V * 1 A = 40 W which tells us what torque it can deliver!
Motor 2: Nominal voltage 4 VDC and nominal current 10 A. Power = 4 V * 10 A = 40 W which tells us what torque it can deliver!
The answer is motor 2! Why? The 10 A nominal current tells us that the coils are able to operate with a current of 10 A. They have a bigger diameter of the copper cable in the coils.
The benefit of the motor 2 is the following: Apply 40 VDC to motor 2 and connect a resistance to the controller component L297 that indicates to the controller to allow 10 A of current through the coils in the stepper motor. Let's compute what power and in consequence, the relationship to the torque the stepper motor can supply:
Voltage 40 VDC and nominal current 10 A. Power = 40 V * 10 A = 400 W.
The motor 2 can deliver 10 times the power and therefore the torque the motors have when operating it at nominal values of the motor. The component L297 uses PWM functionality to reduce the duty cycle of the current so that in average just 10 A flow.
This is key to know about stepper motors: The more current it can handle to flow through its coils the more torque it can deliver.
But in the first video is even more information about operating stepper motors. The experiment in the video uses a component that operates the PWM at just 1 kHz, a frequency we can hear and as a consequence the motor is loud! So you will operate a stepper motor with a frequency you cannot hear to operate a motor with less noise. As the presenter in the video mentioned, PWM is used at many places around us. The receiver of our R/C systems operates at 50 Hz resulting in a length of the cycle of 20 ms! This means that the receiver, based on the inputs it gets from the transmitter, will apply the adequate duty cycle. It happens to be that our servos expect to get the PWM controlling its position every 20 ms or 50 times a second. So when I move the stick on my transmitter full down and also the trim full down the duty cycle has its smallest value and moving the stick on the transmitter full up and the same for the trim you get the longest duty cycle. So when a microcontroller like an Arduino measures the length of the duty cycle it gets a digital number that expresses the length of the duty cycle. measuring the 2 extreme positions of the transmitter stick a program running i.e. on Arduino gets to know between what numerical values the duty cycle can be varied from the transmitter, or in other words it will be able to control as many servos as we want by sending every 20 ms a duty cycle of the proper length.
This enabled me to fix the awful performance of the robbe multi prop functionality. Instead of using the expensive and terrible multi prop unit in the model I did replace it with a microcontroller. It could be i.e. an Arduino Uno clone from China for 2 Euros i.e. including the cost for shipping. The multi prop module in the transmitter and the same applies to the multi-switch module from robbe or a module that combines prop and switches. It transmits every block of 8 20 ns cycle time the duty cycle the 8 servos you can control. So using i.e. an Arduino Uno it can digitize the duty cycle for each of the 8 servos that the multi-prop module in the transmitter transfers to the receiver channel of which the multi-prop is transmitting the data for up to 8 servos and use additional 8 pins to generate every 20 ms the duty cycle by using a PWM. Now the multi-prop module in the transmitter generates the high-quality PWM signals to control 8 servos with the usual speed and usual torque of the 8 servos. So now you have replaced an expensive robbe module Multi Prop 8 Modul price tag today 73 Euros, similar price tag used to be for its counterpart on the receiver side, plus shipping costs with a similar price tag with a just 2 Euros Arduino Uno. You can also replace the transmitter module, but I had already spent the money on the transmitter module!
Now let's go on with my sail control system.
In my model, I use 12 LiFePO4 battery cells that provide nearly 40 VDC when full and 24 VDC when they have to be recharged. My stepper motor has a nominal voltage of 3.7 VDC and a nominal value of 3.8 A or a power of 3.7 VDC * 3.8 A = 14.06 W. When operating my stepper motor with full and e,pty battery cells, this are the values:
24 VDC * 3.8 A = 91.2 W or approx. 7.5 times the power and in consequence the torque compared to using nominal values! 40 VDC * 3.8 A = 152 W or approx. 11 times the power and in consequence the torque compared to using nominal values!
Next comes the explanation why stepper motors run slower than brushed DC-motors, not even to speak about brushless motors.
Remember that the voltage and current you supply to the 2 circuits. When just holding its step position my stepper motor would have the power and related torque computed above. But those 2 circuits of the bipolar stepper motor have 2 coils connected in series. Now what comes into effect is the so-called induced voltage. This voltage value has the opposite polarity of the applied polarity to the circuit. The value of this induced voltage is proportional to the speed with which the voltage applied to the coil. So looking into the induced voltage while the stepper motor holds its position:
As the speed with which the stepper motor does its steps increases the induced voltage of opposite polarity increases as well and so when induced voltage = applied voltage then the resulting power becomes 0 W because of the resulting voltage = 0. So the faster a stepper motor rotates the less torque it can deliver. Somewhere above a resulting voltage of "0" the internal loses of the stepper motor due to electromagnetic effects and mechanical reasons make the stepper motor stop stepping and just making noise. Here my video of the experiment where I wanted to know how fast the stepper motor I am going to use can rotate until it stops due to the above-mentioned reasons. I want to add that the load a stepper motor is facing further reduces the attainable step speed. my video shows current and voltage while increasing the speed using a board from Trinamic called steprocker. Another board that I use that allows for higher voltages is called "motionCookie". I got a sample of this board that never came into production:
Additionally to what I have presented to you, please take attention of the noise the stepper motor makes. It can perform totally silent to very loud. So when deciding how fast you will operate a stepper motor you have to combine the information about the required torque, means the voltage at which you operate it and at which speed to operate it so that it operates as silent as possible. What you will see is that this stepper motor operated with 24 VDC is placed on a large wooden surface that amplifies the noise the stepper motor makes through its vibration.
I stop now as if you are interested in the topic, you need to digest it! Remember the knowledge I was getting while studying and experimenting with the stepper motor and its controller are key to decide how to implement the winch functionality the stepper motor has within its job to control the sheet length.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Stepper Motors, Part 2 Fri Oct 26, 2018 12:29 am
If you have never studied stepper motors before what I presented last time takes some effort to digest it, or you are much smarter then what I can accomplish!
Let us continue by referring where in my project of building the Carina from scratch the issue of the sail control system fits:
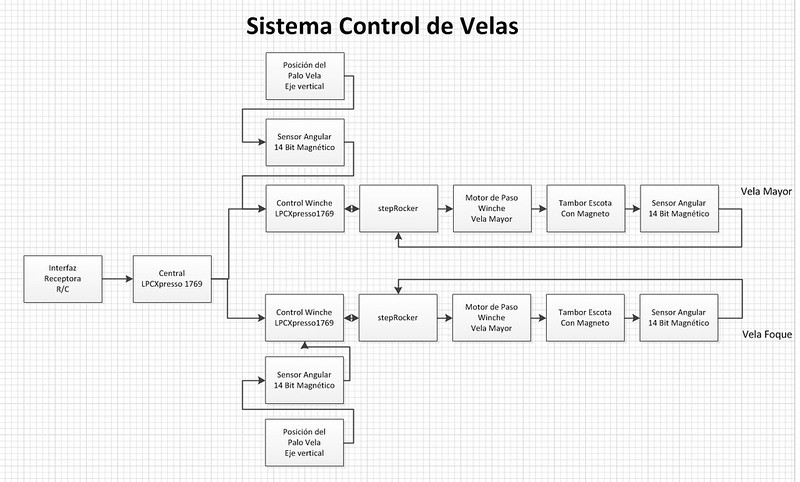
I made this block diagram quite a while ago because of a naval modeling aficionado expressed his interest to start experimenting from the programming side. Sadly this friend got very sick and could not engage himself in this. So let's explain the diagram. It is not as complex as it might look on a first sight. In my model, I use 2 stepper motors of the kind you could see in the youtube video. One for the mainsail, one for the foresail. So the 2 branches, or in another way, the diagram splits into 2 identical branches as for both sails I will use my same system. Both sails will have a boom and will be having an axis around which they turn.
The 2 sail control branches use a stepper motor to turn the sheet drum, both drums have identical dimensions:
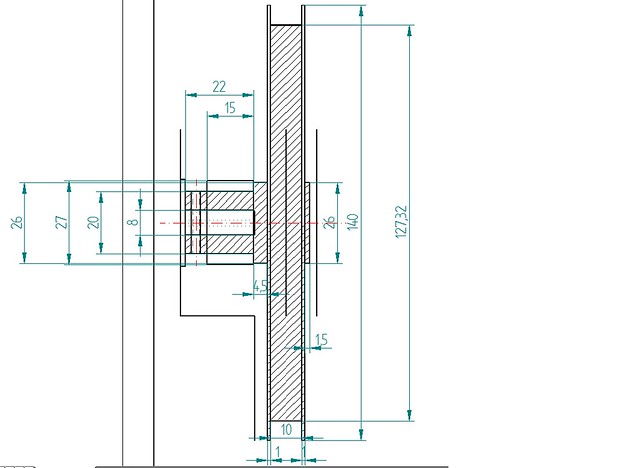
The hole drilled into the drum on the left side with a diameter of 8 mm is where the shaft of the stepper motor is inserted. The vertical hole has an M6 thread so that I can fix the drum on the shaft with an M6 screw without a head and an internal hexagonal cavity to apply a screwdriver. I do insert those screws on both sides not to create an imbalance that would result in vibrations that would have to be taken by the aluminum structure of the sailboat. Al data is in millimeters. The 140 mm diameter is what will fit into the case in which the drum will be turning. The sidewall of the case will have a tight fitting diameter cavity so the sheet cannot get between the drum side wall and the case. the inner wall of this drum will align with the case in which the drum is. The total width of the drum is 10 mm with walls being 1 mm what leaves 8 mm for the sheet to winding. The hatched areas are the aluminum of the drum. Around the left side is a brass cylinder. In the photo you see it while I was pressing it onto the drum:
Next, you see the drum still in construction but connected to the stepper motor.
Just a side comment: My stepper motor has more than the cables mentioned earlier. The reason is that it has 4 circuits each with 2 coils as shown earlier. This offers the choice to have those 8 circuits have always 2 of them connected in series or to connect them in parallel. This has an effect of either having more torque or to be more stable in their operations. Remember that my experiment to find how fast the stepper motor could run without a load and with a nominal voltage of 24 VDC. As you might remember I had one multimeter showing the current and one showing the voltage. The current kept augmenting while turning faster and the voltage did slowly get down. Maybe you know why the current kept augmenting while increasing the speed? Yes, it is the induced voltage that did work like a load. The voltage slowly dropped from a value a bit over 25 VDC to values below 25 VDC. It is typical that power supplies drop their voltage output when the load is applied!
This drawing presents most of the circuits in bipolar stepper motors.
I want to share with you an experience I had when I started to experiment with the stepper motor you see in the video and photo. I was visiting my brother who lives in Mexiko and I got there a power supply that gave me 12 VDC to feed this stepper motor and a controller board with the pair of L297/L298 I did introduce you to in my last publication. I got frustrate because I did not succeed to get the stepper motor stepping! Using the setup shown in the video, now with the controller board named MotionCookie, I found out that this stepper motor does not work with less than 32 micro steps. I could verify this by feeding my stepper motor with 12 VDC and starting from full step. Only after I set 32 micro steps the motor started operating properly. I believe many, like it happen to me stop dealing with stepper motors due to the problems they encounter!
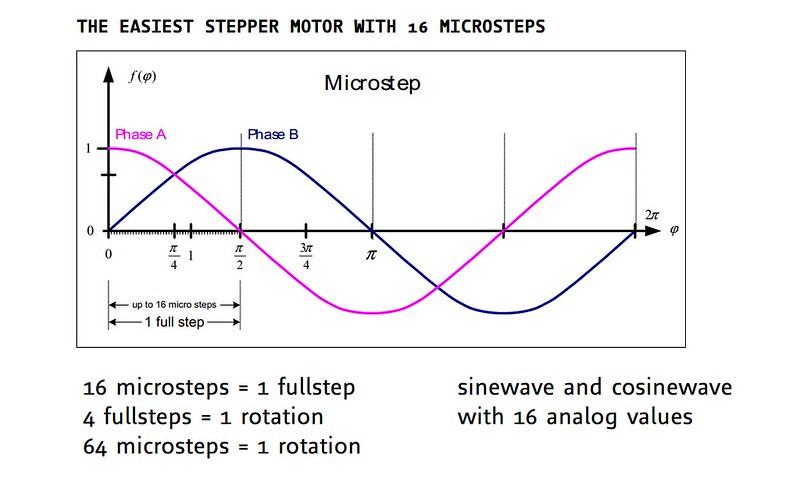
Having written this I want to introduce to you what micro steps are. Most hybrid unipolar stepper motors make 200 full steps to do a 360° turn. Mico stepping is a technique that splits each one of the 200 full steps of the stepper motor. Why is this helpful and what is the reason to be so?
Just to have introduced this. A 360° turn is a full turn. If you want to compute the length of the circumference of a circle the equation is:
Circumference = 2 * Pi *r
Being "r" the radius of this circle. So if you want to talk about the angle of a circle the radius is irrelevant, just the value "2 * Pi" is. So the drawing above shows the 2 circuits that are in a stepper motor, they call it "phase". So 2*p1 is a 360° turn, "pi", is half that amount or equivalent 180° and one half of 180° or "Pi" is "Pi/2" or 90° turn. So what do those 2 phases = curves say? It can be a bit confusing correlating the 2 drawings.
In one circuit the coils are in series shown horizontally and in the other circuit, the coils are perpendicular. They are at a 90° angle. This 3rd drawing might help to understand. Look at each of the 2 phases or circuits as I did name them.
Let's name the Phase A the circuit which has its coils in a vertical position and let's assume you apply +12 VDC or speaking in logic levels, *12 VDC = "1! So in the first drawing, the red curve at the beginning position has the value "1". Phase B, the black curve has the value "0".
So what micro stepping says is that you don't switch like in the 2nd drawing from +"1" to -"1", or speaking in voltages applied to the circuits you don't switch from "+12 VDC" to "-12 VDC".you do not just invert the polarity applied to the circuit. You might remember what I wrote about induced voltage. The value of the induced value depends on how fast how much the voltage value applied to a coil changes!
Look and compare the curves from "0" to "Pi/2". When micro-stepping the controller, the L297 i.e. modifies the voltages is small junks. Each step in the left drawing reduces the voltage on Phase A and increases the voltage in Phase B. Mathematically the vertical position, Pase A, follows the sinewave and Phase B the cosinewave. So now each step of the turning stepper motor is not a full-step but one of the micro-steps. The change of the voltage levels is here only 1/16, respectively the 1/16 change of the sine wave and cosine wave. To put it simply, it is much, much smaller change of the voltage levels, but here you would need to make 16 steps to make what one full step makes the stepper motor turn. If you keep making the steps by giving a pulse to the L297 to say advance 1 step it will only turn 1/16 of what it did before in full steps! You need to give 16 pulses to have the stepper turn the same amount it does on a full-step!
So my stepper motor applying 12 VDC and 16 micro-steps setting did not turn, setting it to 32 micro-steps it did step!
Trinamic that develops stepper motor controller and sells them worldwide not only makes very advanced controllers by applying techniques that benefit the user of it's products, but also provides for free a development environment, called IDE, for Integrated Development Environment. The IDE from Trinamic I did use for setting up and controlling the parameters of the stepper motor operation was an early version. Since those days their IDE has done tremendous advances and their controllers now have a lot more powerful functions. Just let me close today by showing you a video from Trinamic an example of what their controllers can do:
This S-Ramp functionality is key for the use of a stepper motor in my sail control system:
These 2 charts show 2 techniques to have a stepper motor move from an initial to a final position. While inertia of a stepper motor will result in a linear ramp from speed "0" to "full-speed", a micro-controller feeding pulses to a stepper can give pulses in a much higher speed, knowing when to initiate the ramp to change from full-speed to full-stop would be a real challenge. So the s-shaped ramps are beyong what you could normally handle.
If I want to change the sail angle by pulling its beam closer to the hull center axis, pulleys and the sail-beams would have a mechanical problem if my very strong stepper motor just rips the sheet. Defining the parameters of this s-shaped ramp allows me to adapt it to what I want.
This video shows another feature of the trinamic stepper motor controller that I believe is very important when using a stepper motor for my sail control system! In undisturbed operation the stepper motor does what I want it to do. Now imagine that something blocks the movement of either the sail or the sheet that controls the sail position! Here the "stallguard" functionality is key! The raw power of the stepper motor could easily damage the sailboat model. If you want to go and entertain yourself, just go to Youtube and search for Trinamic!
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Tue Oct 30, 2018 8:21 am
I am in doubt about how to proceed with this report from my project, the sailboat model I call Carina. You, my audience, are naval modelers and so I try to keep the link to my project of the Carina. Stepper motors and sensors for angular position sensors play a key role. This on one side has to do with technical material od the mechanical and electronic tools used and the theory about the tools and the other side is the functionality I do expect from the tools used. I will try to see if presenting the functionality I want to achieve first.
This is the top view of the system I am developing for my system to control the sails to implement the requirement the implementation of the scheme used by the original sailboat Endeavour as far as those parts on deck are related.
The requirement my system has to accomplish can be summarized by the following points:
1. I need the system to change the length of the sheet by 8.3 meters without getting a loose sheet that might hang on obstacles on deck. 2. I need to monitor the actual angular position of both the main and the foresail. 3. I need to have the stepper motor to release only so much sheet as it is required to allow the sails beam to be in its current position. 4. I need the system to keep track of the control stick position of the user as it determines the maximum angle the bean can open (angle). 5. I need the system to be able to have threshold values that define how the system has to react to allow free movement of the sail angle as long as the limits defined by the user are not reached. 6. I need to have the angular position detected by the sensor and the computed one to correlate and to have it fixed when there is a difference due to step errors by the stepper motor or errors due to sensor limitations.
For this, my thinking about it has come up with the following concept that takes advantage of the capabilities of the sensors used.
This drawing I used to get a clear picture of the magnitudes involved in the process. It starts from what a user does by putting the control stick on its transmitter in a certain position. This is the top drawing. I do assume the user has the opportunity to set 64 positions of the control stick, from full forward to full backward. I think this assumption is on the safe side as it assumes a pretty high resolution the operator can set the position of the control stick. Probably it is much lower the achievable resolution. This is a resolution that can be coded in the 64 possible values of 6 bits. 2^6 = 64. This value, that is the operator's instruction to the sailboat can be accomplished by digitizing the signal from the associated RC channel using the PWM based decoding of its duty cycle. The value would be stored in a variable used for further calculations and control of the system. This value would be monitored every 20 ms, the cycle time with which the transmitter sends data to the receiver. Should a value calculated from the monitoring of the PWM change compared to the one stored in the variable, a threshold would define the sensibility of the system to user actions and when the difference to the formerly value stored in the variable is bigger than a certain defined threshold.
This was the "input" to the system from the operator.
The second source of input is the angular position of the monitored beam angular position by the use of the magnetic angular sensor position data. Here I have assumed 1024 possible angular positions of a beam. Please be aware of, this number of monitored positions are limited to an angular value between "0°" degrees and "90°" degrees The total 360° positions monitored by the sensors relative stepping of angles is 12 bits or 4096 positions. This information is passed from the sensor to the 3 pins of the quadrature decoder peripheral function of the LPC1769 microcontroller. The microcontroller does the monitoring and servicing of registers content without the microcontroller software to be involved. The magnetic angular sensor also has the capability in parallel to make an absolute angular position monitoring with 14 bits resolution or 2 additional bits resolution compared to the relative position reported to the controller by the quadrature encoding, or 4 angular positions, 2 to the left and 2 to the right, one of the positions being identical to the relative reported angular position. This means that the threshold of +/- 2 positions of the beam is available just due to the 2 additional bits resolution of the angular sensor. So the absolute positions monitored through the absolute angle monitoring of the sensor in the +/- 90° the beam can have in relation to the center of the hulls axis is 4096.
Finally, at the bottom of this drawing I put in relation to the angles sensed by the magnetic angular position sensor the number of micro-steps positions there is between "0" and 21 full turns of the stepper motor does to accomplish the 8.3 meters: 1.075.200 possible positions for the stepper motor. This is nearly 1000 stepper motor micro-step positions for every magnetic angular relative position (12 bits) and 256 absolute positions for every possible absolute angular position of the sails beam.
This drawing shows the thresholds (umbrales) in relation to 3 possible relative angular positions of a sails beam.
Now a typical event I do encounter in my project. I am studying the topic of artificial intelligence, short AI. I am contemplating to apply AI to this fine control of the sails beam position and the stepper motors position instead of writing an algorithm to make the computations that the above fine control involves. AI methods characterize themselves by the need to train them and to do so to have a massive set of data. My system would generate such data sets in huge volumes thanks to the large flow of data from monitoring through the use of the magnetic sensors. The topic and the activities to learn the methods like "machine learning", short "ML" in its diverse flavors and neuronal networks with their own flavors of methods makes a lot of fun for me and the repercussion of AI, what we know today is called weak AI, to the job market and in consequence for the financing of our states requirements, of the social systems and healthcare issues if a massive loss of jobs would be the consequence. I want to highlight this as an example of why I do not mind to have multiple unfinished projects running in parallel. by my way of handling this, I do encounter often new fields of knowledge that I would otherwise never learn of their existence and to learn at least a bit about them.
Because I did realize this pretty late in my process to develop my sail control system I want to share with you why such a relatively complex topic could make sense to deal with it. Reflecting on how my system would work I came to find scenarios that required my attention. (At least I think so)
The dependencies have a hierarchy.
1. The top is what the user commands via its RC transmitter. This results in a value stored in the software of my sail control system. This value defines up to what angle the beam of a sail is allowed to open. That is the usual principle of established and mature sail control systems I presented earlier. In my system, this value implies a value for the stepper motor position, one value out of the 1075200. It also implies two angular position values for the magnetic angular beam sensor, one is the relative value that is passed to the quadrature encoder and one is for the absolute value from the sensor.
2. Let's start from assuming the beam of the sail to be in one of his possible angular values. Then the stepper motor will rotate to the stepper motor position defined in the table. Should the actual angle of the beam be at a smaller angle then the max authorized by the RC operators value, then the stepper motor will keep stepping keep adjusting the sheet length while the thresholds prevent the sheet length be limiting the free movement of the sails beam. Should the actual angle of the beam of the sail be identical to the angle defined as the maximum permitted due to the operators RC transmitter stick position, then the system will stop increasing the length of the sheet so to hold the sail in the position desired by the user.
As it is key for the secure operation of my sail control system that the values for the angular position of the stepper motor and the sails beam are accurate regular correlation of the values supplied by the sensor and the computed values are to be identical. Every time the sail swings from one side of the hull to the other side it passes through its center, angle = "0°", the PWM of the "I" PWM is in its active duty cycle. The same principle applies correspondingly to the stepper motors position. The relative angle reporting will signal when a 360° step position is reached via the "I" PWM of the quadrature encoder. The software will compare the absolute position variable it is maintaining with a pass through the indexed position.
Guest Guest
Subject: Re: Building my Sailboat Carina from scratch Tue Oct 30, 2018 11:10 pm
this model is beyond my comprehension...…….just can't take it in or even understand most of it...………..
all I can d is look on in awe,,,,,,speechless.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Thu Nov 01, 2018 8:22 am
I am working on the same project since quite a bit more than a decade. During my professional time, I use to be at the beginning a so-called FAE, Field Application Engineer at a large US semiconductor company and stayed in that field for nearly 2 decades. So when I lost my last job as an employed person I did reactivate my old hobby of model making and switched from planes to boats. I love to dig myself into topics that come up during the project and allow myself to include new fields of knowledge. So the objective of my project is not to get it done. The way, the work on the project is my objective. So if after such a long time having a lot of time available it would be sad if the things I do would not have increased their complexity. Effectively since nearly one year, I am studying the topic of artificial intelligence and trying to find out if I could implement my detailed control of the sail control system as an AI implementation. Once you get into AI the topics are quite a large number and the field of AI is developing in an exponential way. Even the semiconductor components are undergoing an impressive development. Latest is a chip called Brainchip that implements 1.2 million equivalent of a neuron and more than 10 billion dendrites. It uses a new approach in semiconductors by implementing a technique they call pulsed which reduces the power consumption of the device at least by an order of magnitude. This will make possible to have AI functionality in future smartphones that will contain this chip. So instead of developing, writing and testing code in the traditional algorithmic way AI methods could be appropriate. As I use those magnetic angular sensors for tracking the beams of both sails and the position of the stepper motors I can generate the huge number of test sets required to train an AI system. But also the impact of AI on the job market and in consequence of a number of fields related to social, financial and political developments to face that impact is a field that gives room to a lot of reflecting and a lot of commenting in the media.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Tue Dec 18, 2018 9:49 pm
I will continue publishing this report of my building the sailboat model Carina. I did have to go to the hospital 2 weeks ago. The level of sugar in my blood was totally out of control. For those of you, that know about diabetes, the long-time value was 11 and the sugar level checking it was 408.
This gave me the opportunity to reflect on what new technologies could be interesting for my model and I found 2. One is to add the voice interface to my model, useful i.e. when setting it up at the pond or while working on it in my workshop. Alexa is available to be implemented on microcontrollers. so that I can assign tasks to different voice commands and get the answer also by voice.
The other one is using artificial intelligence to do the fine tuning when controlling the length of the sheet. Up to now, I have been working on an algorithmic solution which has to take into account different operation cases. Using AI means having a huge number of data samples to train the AI. As my system works with sensors that have a pretty high frequency generating data and the position of the control stick at the transmitter is updated every 20 ms or 50 times per second. Between those cycles, I take the "old control stick position data" and feed every data sample defined by the frequency of the sensors.
To consider to apply AI to control my sheet control system that controls the position of the sail I have to specify what is true data input, means valid data, make myself clear which variable data the AI has to manage and what result is valid and correct or wrong and why. That has proven to be quiet challenging on 2 fronts. One is to generate a database of valid data points and valid or not valid results.
The second aspect is to determine which of the different AI methods would be suited for the task. Both aspects impact each other. As a lazy person, I have started to publish a request for help to answer my questions in AI forums. I have not seen a response yet. No wonder, as the challenge to phrase my question properly is no simple task for me.
Totally separated from the previously addresses topics of this contribution to my thread, I start to feel an urgency to get my panel version 3 up and running.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Health is still slowing me down Mon Dec 31, 2018 5:48 pm
I have decided to advance my panel building to achieve an advance visible to me. I am putting effort now on defining the circuitries required to operate the color LEDs the way I want. remember, these studies and experiments are applicable to the lightning parts of my sailboat model. What I have found out is to clearly define my objectives and then explain what and why I am doing certain things.
1.: I want the color LEDs to do shine with the color I am assigning to the receptacles of each of the 8 voltages my panel offers.
Please be adviced that have yet to color receptacles to give them the right color. I am using the color code of a PC power supply as a reference. You can see 5 mm diameter holes drilled next to the switches. That is where the RGB LED will be placed.
2.: I want to have the RGB LED ON, when the switch that controls if the receptacles above it have power connected to them. This means that the RGB LED circuit board is only connected when the switch is in the ON position.
3.: I want to be able to dim and to change the color of each RGB LED from my Windows 10 Pro desktop.
This is the Raspi ZERO W board I will be installing in my panel.
This graphic shows the circuitry I am using to start modifying it to my specific needs. A short explanation as it may contain information useful for anyone planning to use an RGB LED. This circuit is, therefore a simpler kind but helps to understand the key issues.
To start with, the circuitry in this graphic is fed by the positive pole being a 5 VDC here taken from the Raspi board. In my panel the source is the power available at each voltage and will, therefore, be one of the following voltages:
+40 VDC, +24 VDC, +12 VDC, +5 VDC, 3.3 VDC, -5 VDC, -12 VDC plus one that will be supplied by an external source on a case by case.
You can also see on the graphic that 3 pins are required to control the brightness of the 3 colors that make an RGB LED, red, green and blue. As my panel will have 8 of those RGB LEDs with each of the 3 pins that need to be fed by a PWM a total of 24 pins and corresponding PWMs are required. To fix this problem, as the Raspi does not have that many pins and hardware to execute 24 PWMs I use the PCA9685 Board you see next: I will be using 2 of this boards to which the Raspi can speak via a pin called I2C. This boards can be programmed to realize 16 PWM each at the desired configuration. So I split my 24 PWM putting 12 to each PCA9685 board. This means that the Raspi pins are used to a minimum, just the I2C bus.
So the other 2 pins shown in the graphic, GND and 5 VDC will be coming from the GND and from the positive pole of each column of receptacles.
This is fine, as long as the positive pole is plus or minus 12 VDC. The resistors R4, R5 and R6 can be calculated to limit the maximum current flowing through the LEd to be 20 mA using resistors that can resist up to 1/4 W. Remember, the dimension W = watt, is composed of the current and voltage:
Watt = Ampere x voltage.
Watt = 0,020 A x 12 V = 0,24 W
So a 1/4 W resistor is fine for voltages up to +/- 12 VDC: 0,25 W.
The resistors R1, R2 and R3, each 1000 Ohm or as it is written in electronics, 1k Ohm. Their function is to protect the pins and to make them capable to control the transistors BC547. A transistor is an electronic switch which the PWM signal coming from the pin uses to switch ON and OFF the transistor so that either there is a tension flowing through the LED or not. Now PWM takes advantage of the eyes' inability to see fast switching light ON and Off. So the human brain makes us see the average. This way the light is dimmed. The more time the PWM signal switches the transistor to OFF the darker we perceive the LED. Color is achieved by mixing the 3 base colors red, green and blue. The PWM controls the intensity of each.
But what is with the voltages above 12 VDC and even 12 VDC is pretty close to the 0.25 W the resistor can take? Just as an explanation, the resistor converts the excessive power due to the higher voltage into heat. So the 1/4 W surface mount resistors I will be using should not generate too much heat and eventually even being a source for a fire in my workshop.
I have decided to use switched DC-DC converters. While normal resistors convert 100% to heat, the switching converters only do generate between 3% and 5% energy into heat. So fo the voltages starting from 12 VDC I will put this switching converter so that my circuitry will only see 5 VDC.
But here are 2 more issues I am still working to understand them and define a solution. One problem is related to negative voltages. Here the higher voltage is not the negative voltage but GND. or 0 VDC. So -12 VDC and 0 VDC the so-called "positive pole" is GND or 0 VDC. Closely related to this problem is the next one:
The transistor shown in the graphic, the BC547 is what is called an "NPN" transistor and another type is called the "PNP" transistor. Some of you might be familiar with it from the H-Bridge used to control a DC motor. The "high-end transistor" is a PNP one, the low-end pair is an NPN one. Putting it simply, it is related to the voltage levels between the base, this is the place where the lines coming from the pin are connected and the voltage on the other entrance to the transistor.
As I have not dealt with it for a long time I will set-up experiments using a breadboard and the raspi to prove what would be the right solution.
Guest Guest
Subject: Re: Building my Sailboat Carina from scratch Mon Dec 31, 2018 6:43 pm
and I thought wiring a dozen white led's to a battery was going to be difficult. lol.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Wed Jan 02, 2019 12:28 am
Set As always, it is impressing me to find simple solutions were I could not find a solution for. For my problem of how to drive my RGB LEDs the way I wanted is using a 2-pole-4-pins switch. Now what I will do is implementing the functionality to feed the power supply to the receptacles above the switch how I had been planning to do it from the very beginning. The second pole of the switch is connected to a permanent 5 VDC power source. When I do switch the switch from OFF to ON the second pole will feed the circuitry for the RGB LED. The circuitry is now the same for all voltages.
Sadly Neil, as I wrote from the very beginning my sailboat model has a heavyweight in the electronics. If you as a moderator in this forum do not wish me to continue talking about my build from scratch and the parallel development of my workshop, were electronic infrastructure is as of now playing an important role I am willing to leave this forum! Naval models are always a mix of technologies that are applied to it, electronics and information technology are just more technologies that can make our hobby much richer. How would you implement a sail control system that follows the original pulley implementation of the Endeavour and make it possible to change the length of the sheet by 8.3 meters in a hull that is just 1.65 meters long?
Also, an aspect that I think makes sense to my approach of naval modeling is to include the revolution that is taking place right now and that offers an infinite number of possibilities to be used in naval modeling. That you write that you have a hard time to understand my posts is a proof that in general in the naval community, much more than in those dealing with flying models, has not yet adopted the new technologies of our hobby. But I do repeat once more. You are the moderator and if you do not want to deal with these technologies I am willing to leave. The opportunities that electronics opens for our hobby are tremendous and dealing with applying them does fascinate me.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Wed Jan 02, 2019 4:57 pm
Thx. Right now too much is left to do with the workshop and too much in getting electronics done to move ahead on the physical building of the sailboat. There are 2 areas that would next to do on the model were both depend on the electronic stuff. One is to build the drum for the sheet and its case. For this, I need to repair my tower milling machine where it is a prerequisite to getting the table surfaces of both workbenches clean. There is still a lot to be done to be able to address this. The second is the lightning which has to take place before I can apply the triplex wooden ground. First, cabling has to be done, for connecting the LEDs and then the temperature and humidity sensors. So do not expect me to advance those areas before at least one year.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Mon Jan 14, 2019 7:01 am
@nhp651: Your response has given me something to reflect about. It is my belief that in naval modeling the fans do apply many very diverse technologies, each can be as challenging as electronics could be. Surprising for me is again and again how naval modelers block themselves to include DIY (Do It Yourself) electronics and programming of microcontrollers. Naval models are prone to have multiple functions and electronics and the programming of microcontrollers are powerful and far less expensive even to Chinese suppliers. Airplane modelers, whose models can be destroyed completely in a crash are in comparison very open to these technologies. Ships down crash as planes and seldom sink. So the risk is much lower and the potential uses are multiple.
What I do write these days in my report of building my sailboat Carina are topics that, so I believe, are the result of dealing with it on my project over a decade. I would be very willing to help fellow modelers to get familiarized with electronics at a beginners level. The course I have been publishing in the past based on a German version made by a friend of mine was targetting the technology of more than a decade ago. The goal was to support the modelers in simple steps to go from a schematic, a printed version of an electronic circuit to a self-build board, moving along in parallel with the hardware and software.
Today, be it Arduino boards, be it ESP8266 or ESB32 boards or be it RaspBerry Pi, simplify by boards being available that start at a cost well below 5 Euros including shipping. A huge number of programs are available on the Internet, i.e YouTube that just requires sometimes minor adaptations to allow to implement an infinite number of functions. I am not offering to support any full build boards, like sound and smoke generators. There is plenty of support available online. But I am willing to assist modelers willing to look into the topic.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Thu Feb 07, 2019 5:08 am
My health problems are strongly impacting my performance on our hobby. Right now I am fighting to get the sugar levels in my blood under control. They are still double of what they should be. Right now I am working to get my workshop improvements done. In parallel, I am working to be able to move ahead with the electronics. Purely to the topic of building my sailboat from scratch, the next step would be to jump again into learning the advances of the stepper motor controller technology and to do experiments with the sheet drum, but now with load. So I do expect the next post will be in the thread describing my work on my workshop and here with the 2. generation panel.
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Sat Feb 22, 2020 3:03 am
Out of respect I looked at this thread. You know the contributions you deleted were not friendly and as a consequence I tried to make clear why I do the things the way I do and if anything I wrote seems offending, sorry, but expressing myself in the 3. language I speak and write makes me unable to prevent things seeming offending to native speakers. I follow the rules, I try to be respectful but I also do not mind expressing myself in a pretty clear manner and not fsall into uneducated and gang speak. If trying to express myself this way the result is an interpretation as you wrte it Roadrunner, this is a risk everybody has who does express himself in a language not being native.
Now to the topics I am addressing. The purpose of working on my hobby is not going to sail a boat. Sorry, but for me this is boring after a while. What keeps me motivated and helps me to organize my life and be motivated and curios is to reflect what I can achieve using those areas of technology and science i have spend decades of professional life. So for example I want to control the sheets that control the position of a sail in a similar way as it was done on the original Endeavout. So for the length of the boom of my main sail I need to change the length of the sheet by 8.3 meters on a boat that is just 165 cm long.This is something that cannot be achieved using of the shelf winches. Not by the inability of a commercial winch to handle 8.3 meters change in length of the sheet. Tied to this is the need to control the sheet length precisely to the length required by the boom and its angle towards the hull center line. My monitoring of the booms angle with a 14 bit resolution angular sensor allows me to control the length of the sheet to be just as long as required. This is also impossible with a commercial winch. And also there are a lot of topics in my sailboat model that I can solve "my way" thanks to being able to develop my own electronics and do the programming.
The current revolution in the industry towards the "Internet of Things", short IoT, the telecommunication with 5G which in industrial environment shares capabilities that I use in developing my concepts. Add to that the revolution taking place in ML, Machine Learning, and "Deep Learning" and Neuronal Networks offers many opportunities to use those things in my model. Reflecting about it and thinking about how it could be used in my model gives me a huge degree of fascination that ensures my positive attitude towards life to fight and partly overcome limitations due to my health problems. But those health problems are responsable for beeing very slow in my advances.
But all f the above requires an adequate workshoß and an electronics lab in this workshop. Now, so much as the technologies move me towards searching for my own solutions for the model, the same is true for the work on improving and organizing my workshop. A good example for this is the work I am doing to organize my screws, my nuts and other parts. Dealing with it my mind comes up with a pletora of ideas.
You may call this excesive, but the fun I have on developing and building such stuff that represents part of the setup I need to develop mechanica, electronics und programming helps me to search always for a different one of my projects to keep concentrated. So what I do demand is respect and accept that my way of doing things is my way. That sharing this in threads makes it possible for others to know that kind of things and egoistically speaking, it helps me to get up to speed when I return to a project and my health has forced me to get up to speed myself. If somebody does not like it, there is no obligation to read any thread. To think that I write that stuff because I may thing the readers are idiots as it was written in one of the deleted contributions is wrong. I do not have the time nor the concentration to waste my time trying to tell how great I am and what idiots others are. I would not gain anything by doind this!
Hellmut1956 Able Seaman
Posts : 35 Join date : 2018-10-18 Age : 67 Location : Mammendorf near Munich, Germany
Subject: Re: Building my Sailboat Carina from scratch Fri Mar 05, 2021 4:26 pm
I am still alive, very slow due to my health problems, and due to the need to keep saving money if I want to buy something more expensive. Since my milling machine broke down I have not advanced anything on the project of the Carina sailboat. I took, more than a decade ago the decision to improve my workshop to the point where the working surface of my old workbench would be free and that most of the stuff was finally identified and stored in a proper way. But I will open a thread of his own to report about my workshop. I just reviewed my report on building my sailboat model Carina and will try not to repeat what I already presented there.
Sponsored content
Subject: Re: Building my Sailboat Carina from scratch



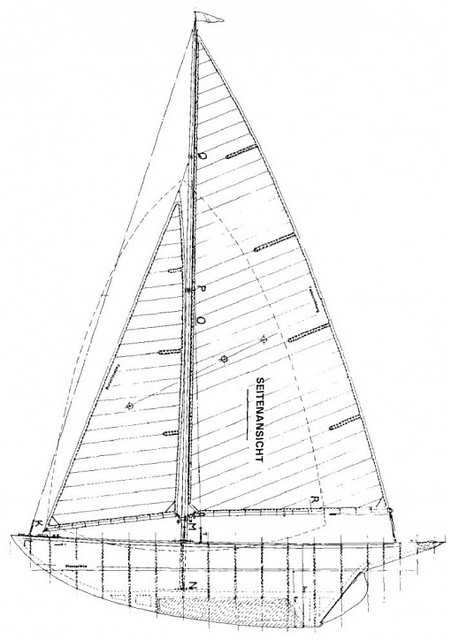
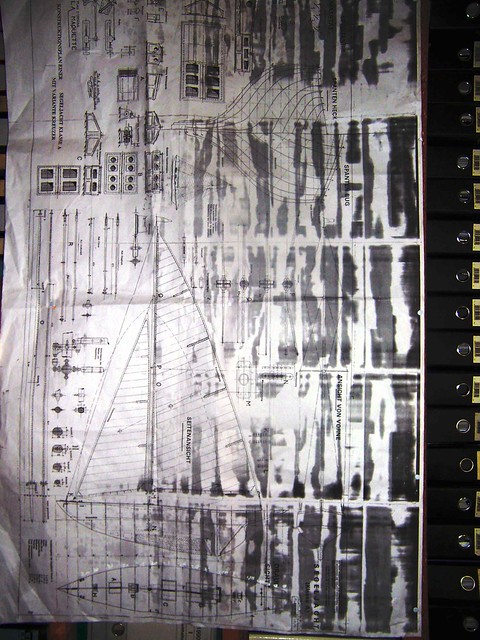
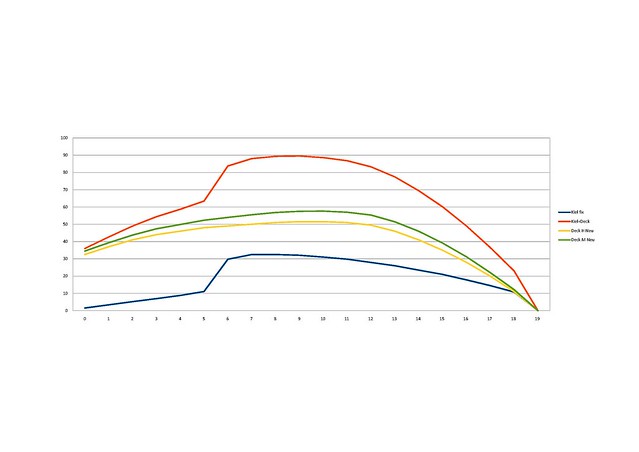















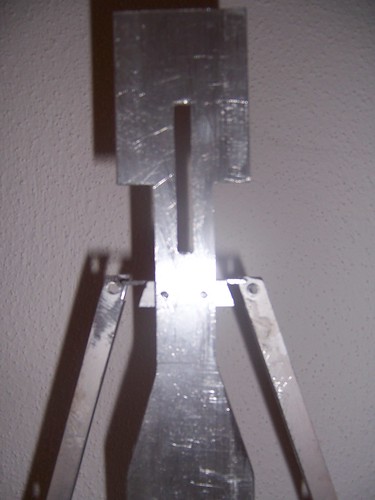




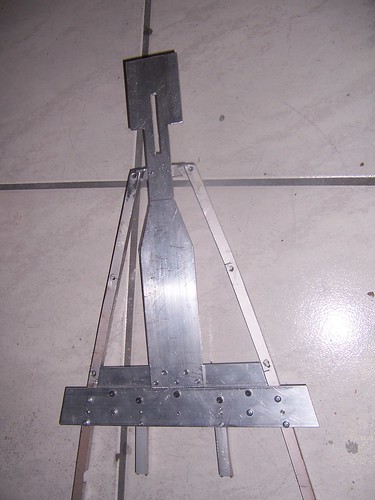

















 how long has that taken you to build
how long has that taken you to build 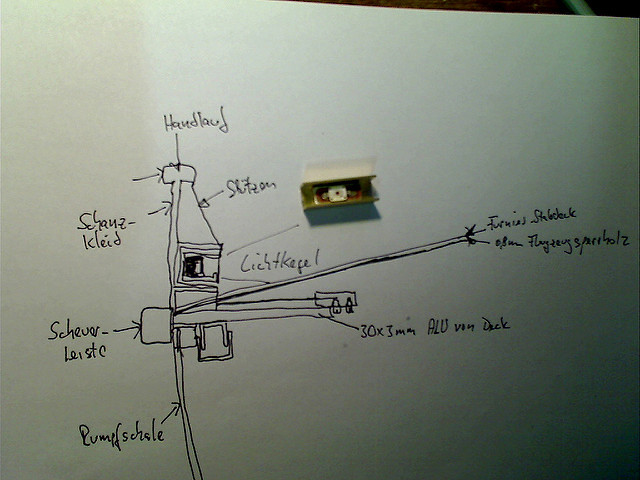
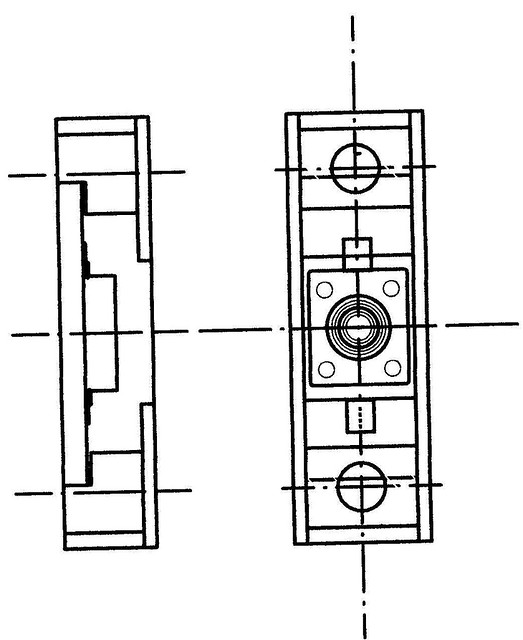
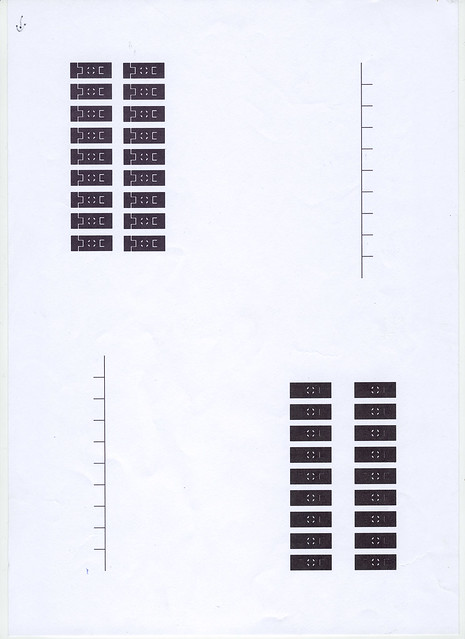





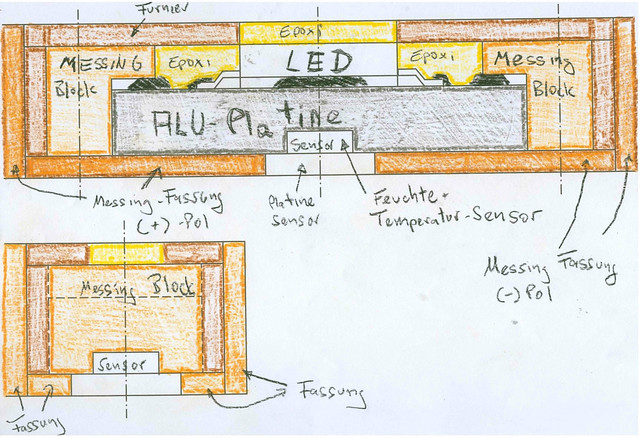
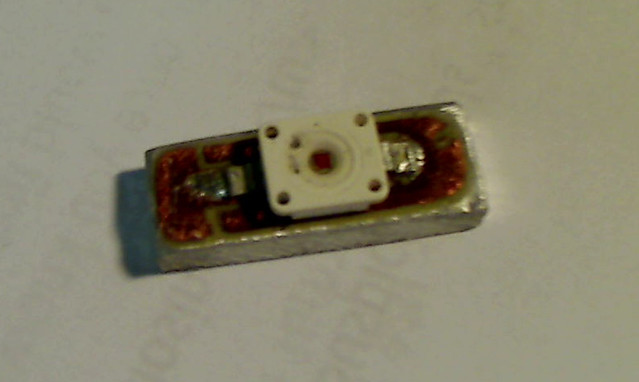
 .
.




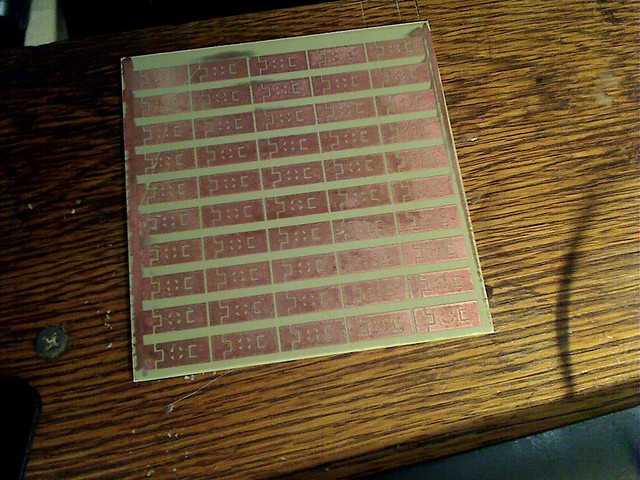










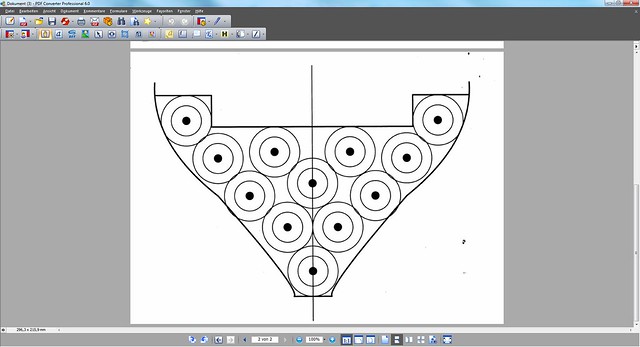

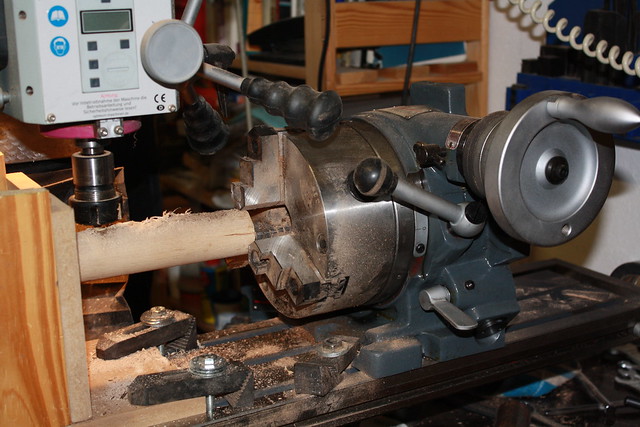


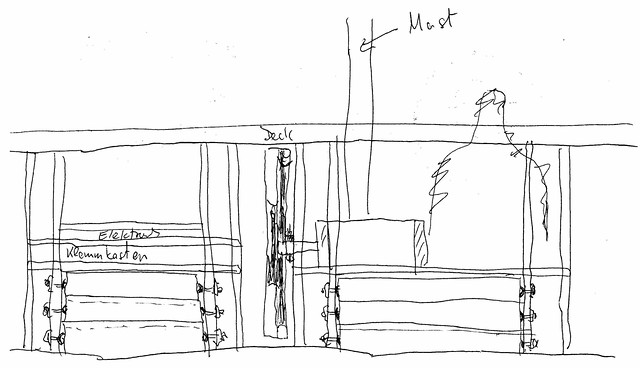
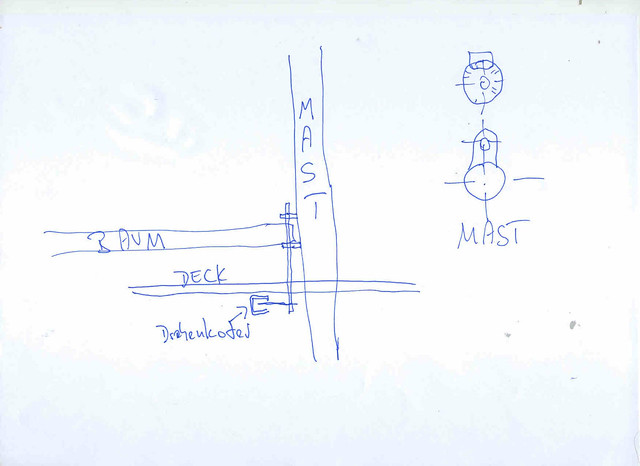
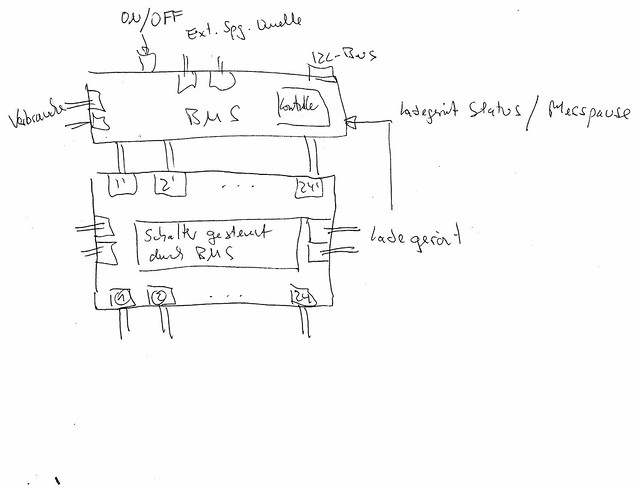
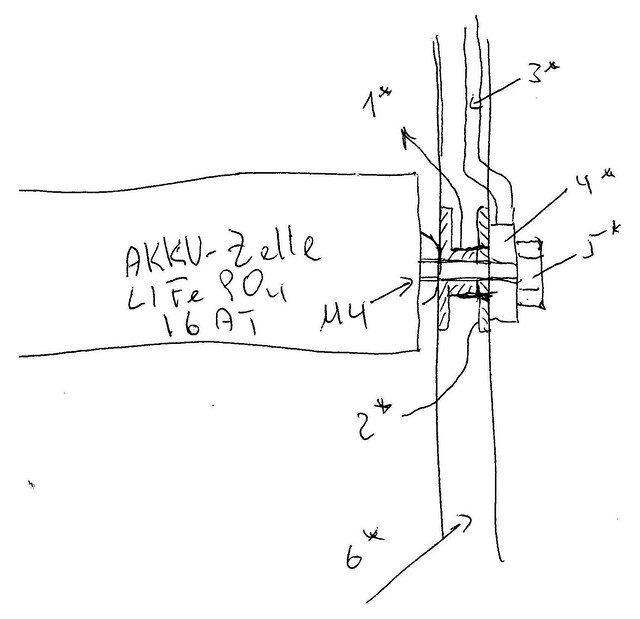

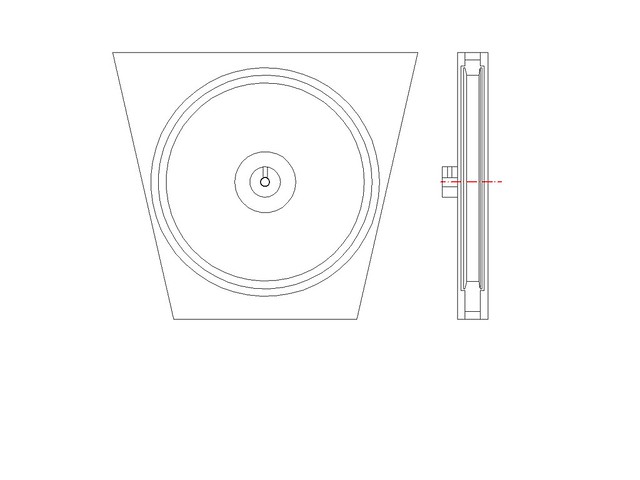





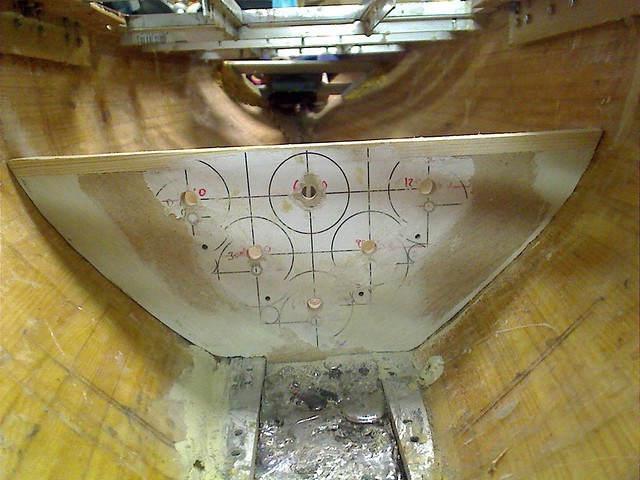


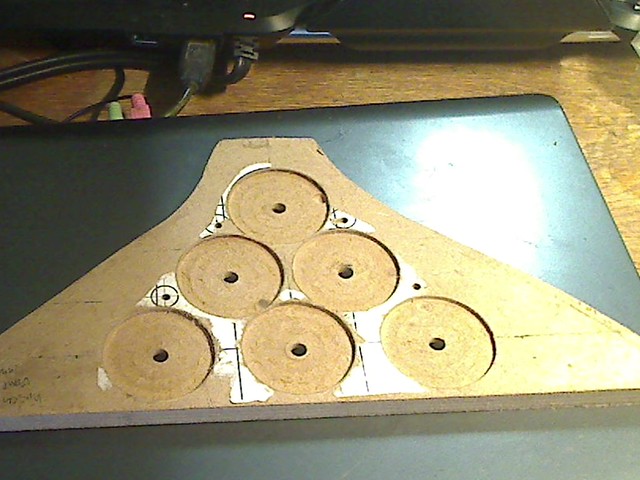




















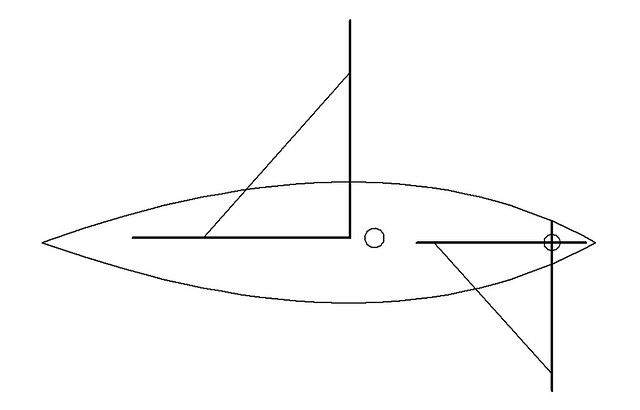

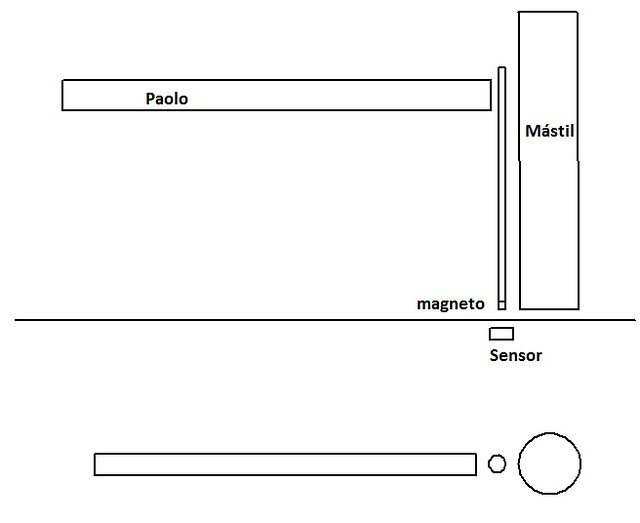
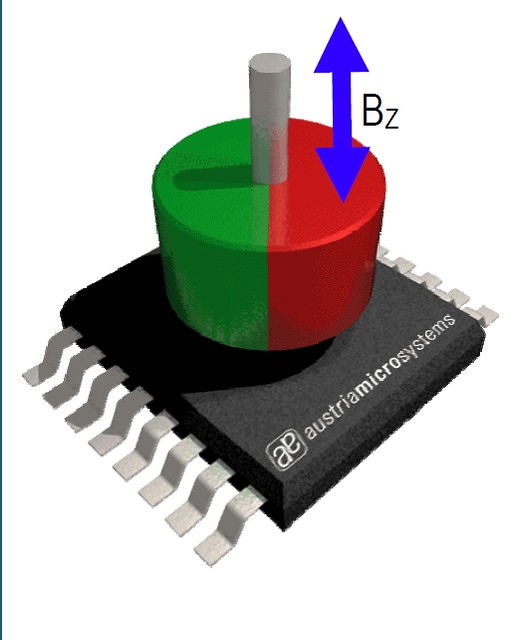
 dynamic angle error compensation
dynamic angle error compensation